Hẳn là các bạn có nghe nói rất nhiều về nông nghiệp thông minh, nhìn dạo quanh trên thị trường Việt Nam cũng có rất nhiều các startup bắt đầu khởi nghiệp với nông nghiệp thông minh, tập trung chủ yếu các chức năng hiện nay là trồng cây thủy canh, giám sát tưới tiêu, tự điều khiển theo thời gian,… có thể điểm qua như Hachi, Greenbot, Mimosatek,..
Mình chưa có điều kiện để sử dụng cũng như trải nghiệm các sản phẩm của các startup trên, nhưng với một số tham khảo cóp nhặt từ google cũng như dựa trên số đồ sẵn có của mình thử tự làm một hệ thống nông nghiệp thông minh đơn giản, 1 phần để xem nó hoạt động ra làm sao, IOT là cái gì, cách để quan sát, giám sát và điều khiển từ xa như thế nào? 1 phần để chia sẻ cho anh em yêu thích nghiên cứu, tìm hiểu khoa học có thể tự làm cho mình một hệ thống có thể ứng dụng được vào cuộc sống.
Bài viết này nằm trong serie về Nông nghiệp thông minh
- Hệ thống nông nghiệp thông minh phiên bản Arduino
- Hệ thống nông nghiệp thông minh phiên bản ESP8266
- Hệ thống nông nghiệp thông minh phiên bản ARM TIVA
Giới thiệu
Xuất phát từ một nhu cầu trong thực tế đó là tự trồng rau sạch, ví dụ như mình thích trồng rau xà lách, thì mình cần có được thông tin về nhiệt độ, độ ẩm của môi trường, độ ẩm của đất. Rồi từ các thông tin này thì mình mới có quyết định chính xác là nên bơm thêm nước hay không ? Quá trình bơm nước có thể được thực hiện tự động để đỡ mất thời gian chăm sóc của mình hoặc chế độ bằng tay khi mình muốn tự chăm sóc cây như một cách để giải tỏa stress sau những ngày làm việc mệt mỏi.
Vậy thì trước khi bắt đầu mình cần xác định một số yếu tố như input/output :
Đầu vào (input) của hệ thống gồm
- Cảm biến
- Nhiệt độ và độ ẩm môi trường
- Độ ẩm đất
- Ánh sáng
- Nút nhấn
- Nút điều khiển bơm nước
- Nút điều khiển bơm thuốc trừ sâu
Đầu ra hệ thống gồm
- Cơ cấu chấp hành
- Relay điều khiển bơm nước
- Relay điều khiển bơm thuốc trừ sâu
- Thông tin phản hồi
- Trạng thái hoạt động của bơm nước
- Trạng thái hoạt động của bơm thuốc trừ sâu
- Dữ liệu hiển thị
- Thông tin nhiệt độ, độ ẩm, ánh sáng, độ ẩm đất, trạng thái các bơm(bật/tắt)
- Dữ liệu lưu trữ
- Thông tin nhiệt độ, độ ẩm, ánh sáng, độ ẩm đất, trạng thái các bơm theo thời gian
Sau khi đã xác định xong thì công việc mình cần làm là
- Đọc dữ liệu và hiển thị và điều khiển bằng tay (chế độ offline).
- Hiển thị và lưu trữ thông tin trên cloud (chế độ online/ IOT).
- Ứng dụng vào thực tế, thay đổi thông số phù hợp.
- Điều khiển và giám sát qua smartphone.
- Cải tiến và nâng cấp.
Trong bài viết này mình sẽ trình bày 2 phần 1 và 2 trước, phần 3,4,5 mình sẽ cập nhật sau
Chuẩn bị
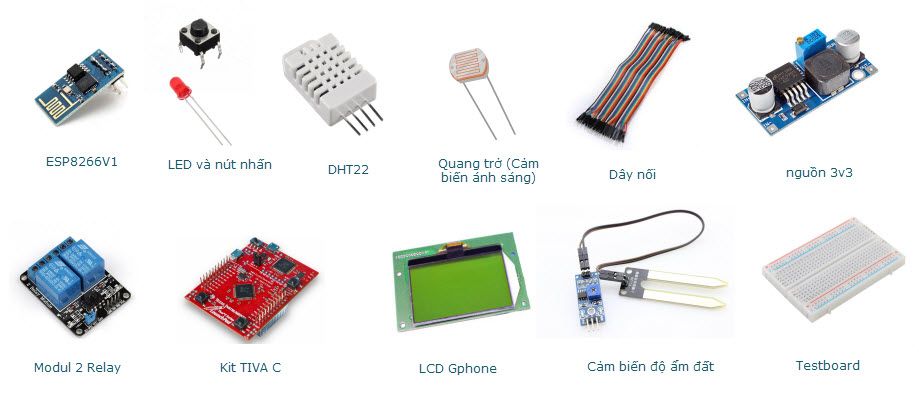
Phần cứng
- TIVA Launchpad/ Arduino/ STM32F1 (mình làm với TIVA C trước)
- ESP8266 v1 hoặc v7/v12 (mình dùng v1 có sẵn)
- Cảm biến nhiệt độ, độ ẩm DHT22
- Cảm biến ánh sáng (mình tự chế)
- Modul Relay (2 relay)
- LCD Gphone
- Nút nhấn và LED (mình tận dụng có sẵn trên kit TIVA C)
- Dây nối
- Nguồn 3.3V
- Testboard (Breadboard)
Phần mềm
- Energia IDE
- Cloud thingspeak
- Thư viện DHT22, Gphone, Simple Timer
Các bài viết cần xem qua
Bài viết sẽ được viết từ dễ tới khó, nếu bạn chưa biết bắt đầu từ đâu hoặc trong quá trình làm việc một số modul bị trục trặc mà không biết kiểm tra thế nào thì có thể tham khảo thêm một số bài viết hướng dẫn từ trước của mình. Mình xin 5 phút quảng cáo dành cho danh sách dưới đây:
- Học lập trình ARM đơn giản với Energia
- DHT22, TIVA C và cảm biến độ ẩm đất
- TIVA C và LCD Gphone/homephone/ST7565
- ESP8266 cho người không biết gì
- Hướng dẫn cập nhật firmware AT cho ESP8266
- Giao tiếp ESP8266 và TIVA C
- Thingspeak với ESP8266 và TIVA C
Coi như bước chuẩn bị đã ổn, giờ thì mình sẽ đi từng bước một, tranh thủ nói luôn tại sao cần phải có thêm bước này bước kia ở từng phần. Cũng đơn giản nhưng hơi dài nên mọi người chịu khó đọc một chút.
Kết nối IO, lập trình kiểm tra các modul
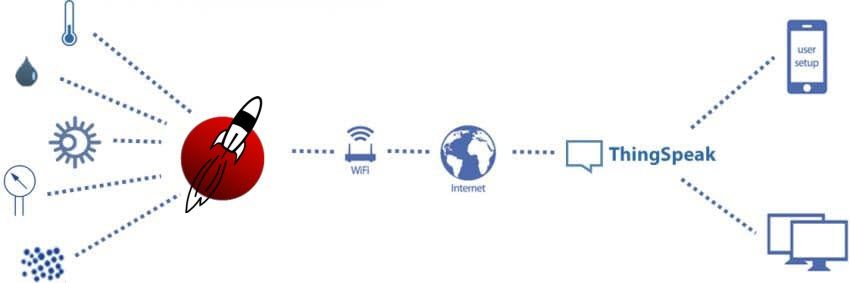
Mình đăng lại hình minh họa có thể là dễ hiểu nhất cho hệ thống này
DHT22
Như đã hướng dẫn đọc dữ liệu ở bài trước, mình nói qua về cảm biến này một chút. DHT22 là loại cảm biến để đọc nhiệt độ và độ ẩm của môi trường khá thông dụng hiện nay. Theo datasheet thì ngưỡng điện áp hoạt động của nó từ 3.3V đến 5V (một số lên tới 6V), nhiệt độ từ -40oC tới +80oC (một số datasheet là 125oC) với độ chính xác +/-0.5oC cho nhiệt độ và +/-2% cho độ ẩm. Chu kỳ lấy dữ liệu trung bình là 2s một lần.
Về chân cẳng thì DHT22 có 4 chân, hầu như loại DHT nào cũng có 4 chân và thứ tự chân là giống nhau
- VCC (3-5V)
- Data out
- NC (not connect)
- Ground (GND)
Thông thường thì phải có điện trở 10K kết nối giữa 2 chân Data và VCC, chân output (data out) sẽ được kết nối với chân của vi điều khiển, ở đây là chân PD0 của TIVA C
Tìm hiểu sơ bộ thế thôi, giờ thì mình đưa chương trình đọc dữ liệu từ DHT ở bài DHT22, TIVA C và cảm biến độ ẩm đất tại đây cho các bạn dễ quan sát
// Chương trình đọc nhiệt độ, độ ẩm từ cảm biến DHT
// Written by ladyada, public domain
// Chỉnh sửa cho TIVA C bởi hocARM.org
#include "DHT.h"
#define DHTPIN PD_0 // Chân DATA nối với PD0
// Uncomment loại cảm biến bạn sử dụng, nếu DHT11 thì uncomment DHT11 và comment DHT22
//#define DHTTYPE DHT11 // DHT 11
#define DHTTYPE DHT22 // DHT 22 (AM2302), AM2321
//#define DHTTYPE DHT21 // DHT 21 (AM2301)
// Kết nối
// DHT | TIVA C
//----------------
// VCC(1) | 3.3V
// DATA(2) | PD0
// NC(3) | x
// GND(4) | GND
// Kết nối chân 1 của DHT với 3.3V
// Chân 2 kết nối với bất kỳ chân nào của TIVA C
// Chân 4 nối với GND
// Nối trở 10k giữa chân 1 và chân 2
// Khởi tạo cảm biến
DHT dht(DHTPIN, DHTTYPE);
void setup() {
// Khởi tạo cổng serial baud 115200
Serial.begin(115200);
Serial.println("DHTxx test!");
// Bắt đầu đọc dữ liệu
dht.begin();
}
void loop() {
// Đợi chuyển đổi dữ liệu khoảng 2s
delay(2000);
float h = dht.readHumidity();
// Đọc giá trị nhiệt độ C (mặc định)
float t = dht.readTemperature();
// Đọc giá trị nhiệt độ F(isFahrenheit = true)
float f = dht.readTemperature(true);
// Kiểm tra quá trình đọc thành công hay không
if (isnan(h) || isnan(t) || isnan(f)) {
Serial.println("Failed to read from DHT sensor!");
return;
}
// Tính chỉ số nhiệt độ F (mặc định)
// float hif = dht.computeHeatIndex(f, h);
// Tính chỉ số nhiệt độ C (isFahreheit = false)
// float hic = dht.computeHeatIndex(t, h, false);
// IN thông tin ra màn hình
Serial.print("Do am: ");
Serial.print(h);
Serial.print(" %\t");
Serial.print("Nhiet do: ");
Serial.print(t);
Serial.println(" *C ");
// Serial.print(f);
// Serial.print(" *F\t");
// Serial.print("Heat index: ");
// Serial.print(hic);
// Serial.print(" *C ");
// Serial.print(hif);
// Serial.println(" *F");
}Cảm biến ánh sáng
Sau khi đã kiểm tra hoạt động của DHT xong thì tiếp tục tới cảm biến ánh sáng. Ở đây mình dùng loại cảm biến ánh sáng tự chế từ quang trở, cái này do đơn giản dễ độ chế nên làm luôn cho nhanh.
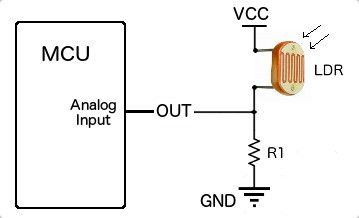
Quang trở LDR là có điện trở thay đổi khi ánh sáng thay đổi, do đó mình có thể dựa trên chân Analog của TIVA C để và cách đọc giá trị ADC để lấy giá trị này.
Như hình chúng ta có thể quan sát được cảm biến này sẽ có 3 chân
- VCC nguồn cấp sử dụng 3.3V hoặc 5V (mình dùng 3.3V)
- GND
- OUT được kết nối với chân PE3 của TIVA
Mình viết một hàm để đọc giá trị trung bình của cảm biến ánh sáng với ngưỡng giá trị ADC là từ 0-4095, sẽ được ‘map’ với cường độ ánh sáng là từ 0 – 100%, nó giống như hình thức chuyển đổi tương ứng như sau:
- “Trời tối hẳn”: Giá trị ADC: 4095 => 0%
- “Trời sáng hẳn”: Giá trị ADC: 0 =>100%
Hàm đọc cảm biến ánh sáng int getLumen(int anaPin)
Kết hợp với DHT22, ta thêm hàm đọc cảm biến ánh sáng, ta lấy 3 thông số là nhiệt độ, độ ẩm, ánh sáng, hiển thị debug ra màn hình máy tính xem thế nào
// Chương trình đọc nhiệt độ, độ ẩm từ cảm biến DHT
// Thêm chức năng đọc cảm biến ánh sáng
// Written by ladyada, public domain
// Chỉnh sửa cho TIVA C bởi hocARM.org
#include "DHT.h"
#define DHTPIN PD_0 // Chân DATA nối với PD0
#define LDR_PIN PE_3 // Chân PE3 nối với chân OUT cảm biến as
// Uncomment loại cảm biến bạn sử dụng, nếu DHT11 thì uncomment DHT11 và comment DHT22
//#define DHTTYPE DHT11 // DHT 11
#define DHTTYPE DHT22 // DHT 22 (AM2302), AM2321
//#define DHTTYPE DHT21 // DHT 21 (AM2301)
// Kết nối
// DHT | TIVA C
//----------------
// VCC(1) | 3.3V
// DATA(2) | PD0
// NC(3) | x
// GND(4) | GND
// Kết nối chân 1 của DHT với 3.3V
// Chân 2 kết nối với bất kỳ chân nào của TIVA C
// Chân 4 nối với GND
// Nối trở 10k giữa chân 1 và chân 2
// Khởi tạo cảm biến
DHT dht(DHTPIN, DHTTYPE);
void setup() {
// Khởi tạo cổng serial baud 115200
Serial.begin(115200);
Serial.println("DHTxx test!");
// Bắt đầu đọc dữ liệu
dht.begin();
}
void loop() {
// Đợi chuyển đổi dữ liệu khoảng 2s
delay(2000);
float h = dht.readHumidity();
// Đọc giá trị nhiệt độ C (mặc định)
float t = dht.readTemperature();
// Đọc giá trị nhiệt độ F(isFahrenheit = true)
float f = dht.readTemperature(true);
// Kiểm tra quá trình đọc thành công hay không
if (isnan(h) || isnan(t) || isnan(f)) {
Serial.println("Failed to read from DHT sensor!");
return;
}
// Tính chỉ số nhiệt độ F (mặc định)
// float hif = dht.computeHeatIndex(f, h);
// Tính chỉ số nhiệt độ C (isFahreheit = false)
// float hic = dht.computeHeatIndex(t, h, false);
// Đọc dữ liệu cảm biến ánh sáng
int lumen = getLumen(LDR_PIN);
// IN thông tin ra màn hình
Serial.print("Do am: ");
Serial.print(h);
Serial.print(" %\t");
Serial.print("Nhiet do: ");
Serial.print(t);
Serial.print(" *C\t");
Serial.print("Anh sang: ");
Serial.print(lumen);
Serial.println(" %");
// Serial.print(f);
// Serial.print(" *F\t");
// Serial.print("Heat index: ");
// Serial.print(hic);
// Serial.print(" *C ");
// Serial.print(hif);
// Serial.println(" *F");
}
int getLumen(int anaPin)
{
int anaValue = 0;
for (int i = 0; i < 10; i++) // Đọc giá trị cảm biến 10 lần và lấy giá trị trung bình
{
anaValue += analogRead(anaPin);
delay(50);
}
anaValue = anaValue / 10;
anaValue = map(anaValue, 4095, 0, 0, 100); //Tối:0 ==> Sáng 100%
return anaValue;
}Kết quả
Cảm biến độ ẩm đất
Coi như xong 2 bạn cảm biến, giờ tới cảm biến độ ẩm đất, cách đọc dữ liệu của nó cũng khá giống với cảm biến ánh sáng, thuận tiện ở đây là modul thiết kế khá ổn rồi nên chỉ việc lấy tín hiệu về để xác định là nhiều nước hay ít nước/ đất khô để tác động bơm nước thêm thôi.
Chân cẳng của cảm biến độ ẩm đất:
- VCC (3.3V – 5V)
- GND
- D0 đầu ra tín hiệu số (ở đây mình không dùng)
- A0 đầu ra analog kết nối với chân PE4 của TIVA C
Mình viết một hàm để đọc giá trị trung bình của cảm biến độ ẩm đất tương tự như cảm biến ánh sáng với ngưỡng giá trị ADC là từ 0-4095, sẽ được ‘map’ với ngưỡng độ ẩm đất là từ 0 – 100% (nhiều nước giá trị thấp, ít nước thì giá trị cao), nó giống như hình thức chuyển đổi tương ứng như sau:
- “Ít nước”: Giá trị ADC: 4095 => 0%
- “Nhiều nước”: Giá trị ADC: 0 =>100%
Hàm đọc cảm biến độ ẩm đất intgetSoilMoist()
Giờ thì thêm bạn cảm biến độ ẩm này kết hợp với DHT22 và cảm biến ánh sáng ta sẽ có được kha khá dữ liệu rồi, mình gom hết tất cả vào một hàm đọc cảm biến. Hàm đọc tất cả cảm biến voidreadSensors(void)
Mình sẽ lấy tất cả các thông tin từ cảm biến và in ra màn hình với chương trình
// Chương trình đọc nhiệt độ, độ ẩm từ cảm biến DHT
// Thêm chức năng đọc cảm biến ánh sáng
// Thêm chức năng đọc độ ẩm đất
// Written by ladyada, public domain
// Chỉnh sửa cho TIVA C bởi hocARM.org
// Kết nối
// DHT | TIVA C
//----------------
// VCC(1) | 3.3V
// DATA(2) | PD0
// NC(3) | x
// GND(4) | GND
// Kết nối chân 1 của DHT với 3.3V
// Chân 2 kết nối với bất kỳ chân nào của TIVA C
// Chân 4 nối với GND
// Nối trở 10k giữa chân 1 và chân 2
#include "DHT.h"
#define DHTPIN PD_0 // Chân DATA nối với PD0
#define LDR_PIN PE_3 // Chân PE3 nối với chân OUT cảm biến as
#define SOIL_MOIST_1_PIN PE_4 // Chân PE4 nối với cảm biến độ ẩm
// Uncomment loại cảm biến bạn sử dụng, nếu DHT11 thì uncomment DHT11 và comment DHT22
//#define DHTTYPE DHT11 // DHT 11
#define DHTTYPE DHT22 // DHT 22 (AM2302), AM2321
//#define DHTTYPE DHT21 // DHT 21 (AM2301)
int humDHT;
int tempDHT;
int lumen;
int soilMoist;
// Khởi tạo cảm biến
DHT dht(DHTPIN, DHTTYPE);
void setup() {
// Khởi tạo cổng serial baud 115200
Serial.begin(115200);
Serial.println("DHTxx test!");
// Bắt đầu đọc dữ liệu
dht.begin();
}
void loop() {
readSensors();
// IN thông tin ra màn hình
Serial.print("Do am: ");
Serial.print(humDHT);
Serial.print(" %\t");
Serial.print("Nhiet do: ");
Serial.print(tempDHT);
Serial.print(" *C\t");
Serial.print("Anh sang: ");
Serial.print(lumen);
Serial.print(" %\t");
Serial.print("Do am dat: ");
Serial.print(soilMoist);
Serial.println(" %");
}
int getLumen(int anaPin)
{
int anaValue = 0;
for (int i = 0; i < 10; i++) // Đọc giá trị cảm biến 10 lần và lấy giá trị trung bình
{
anaValue += analogRead(anaPin);
delay(50);
}
anaValue = anaValue / 10;
anaValue = map(anaValue, 4095, 0, 0, 100); //Tối:0 ==> Sáng 100%
return anaValue;
}
int getSoilMoist()
{
int i = 0;
int anaValue = 0;
for (i = 0; i < 10; i++) //
{
anaValue += analogRead(SOIL_MOIST_1_PIN); //Đọc giá trị cảm biến độ ẩm đất
delay(50); // Đợi đọc giá trị ADC
}
anaValue = anaValue / (i);
anaValue = map(anaValue, 4095, 0, 0, 100); //Ít nước:0% ==> Nhiều nước 100%
return anaValue;
}
void readSensors(void)
{
tempDHT = dht.readTemperature(); //Đọc nhiệt độ DHT22
humDHT = dht.readHumidity(); //Đọc độ ẩm DHT22
lumen = getLumen(LDR_PIN); //Đọc ánh sáng
soilMoist = getSoilMoist(); //Đọc cảm biến độ ẩm đất
}Kết quả
Thêm LCD
Sau khi đã lấy được thông tin và hiển thị lên máy tính ổn rồi thì có một vấn đề phát sinh là muốn kiểm tra dữ liệu cảm biến thì lúc nào cũng phải kè kè theo 1 cái máy tính, mà cái máy tính của mình thì nó còn dùng cho nhiều việc khác nữa, giờ nếu muốn cho bạn bè xem nhiệt độ, độ ẩm đang là bao nhiêu không lẽ lại bảo “Để đi khởi động máy tính mới xem được”, giải pháp để khắc phục được tình trạng này là dùng thêm một LCD để hiển thị thông tin, bạn có thể lựa chọn bất kỳ LCD nào, ban đầu mình có chọn LCD 16×2 nhưng chỉ hiển thị được có 2 dòng, không quan sát được hết, nên phải chuyển qua xài cái LCD Gphone cho thoải mái.
Trong bài TIVA C và LCD Gphone/homephone/ST7565 mình có hướng dẫn về cách kết nối và kiểm tra LCD, mình vẫn giữ nguyên kết nối như cũ, mình chỉ có chút lưu ý là LCD này có 10 chân, và hoạt động với điện áp 3.3V, 2 chân LED K+ và A được dùng để bật đèn nền cho LCD
- GND
- RST
- SCK
- A0(C/D)
- LED K+
- LED A
- SDA
- CS
- VCC
- GND
Vì quá trình hiển thị thông tin cần khá nhiều trong chương trình nên mình sẽ viết một hàm để hiển thị các thông tin này để thuận tiện cho quá trình tái sử dụng void showDataLCD(void). Có hàm hiển thị LCD rồi thì giờ vừa hiển thị trên LCD, vừa hiển thị debug dữ liệu từ cảm biến gửi lên và đối chiếu xem có giống nhau không
/* Chương trình đọc nhiệt độ, độ ẩm từ cảm biến DHT
Thêm chức năng đọc cảm biến ánh sáng
Thêm chức năng đọc cảm biến độ ẩm đất
Thêm hiển thị LCD
HocARM NDTR BOT by hocARM.org
-------------------------------------------------
Kết nối
DHT | TIVA C
--------------------
VCC(1) | 3.3V
DATA(2) | PD0
NC(3) | x
GND(4) | GND
Kết nối chân 1 của DHT với 3.3V
Chân 2 kết nối với bất kỳ chân nào của TIVA C
Chân 4 nối với GND
Nối trở 10k giữa chân 1 và chân 2
------------------------------------------
So thu tu GLCD và kết nối với TIVA
// Pin | Chuc nang | TIVA C
//------------------------------------------
// 1 | GND | GND
// 2 | RST | PE1
// 3 | SCK | PD2
// 4 | A0(C/D) | PD3
// 5 | LED K+ (3.3V) | 3.3V
// 6 | LED A (GND) | GND
// 7 | SDA | PD1
// 8 | CS | PE2
// 9 | VCC | 3.3V
// 10 | GND | GND
*/
#include "DHT.h"
#include "homephone.h"
#define DHTPIN PD_0 // Chân DATA nối với PD0
#define LDR_PIN PE_3 // Chân PE3 nối với chân OUT cảm biến as
#define SOIL_MOIST_1_PIN PE_4 // Chân PE4 nối với cảm biến độ ẩm
// Uncomment loại cảm biến bạn sử dụng, nếu DHT11 thì uncomment DHT11 và comment DHT22
//#define DHTTYPE DHT11 // DHT 11
#define DHTTYPE DHT22 // DHT 22 (AM2302), AM2321
//#define DHTTYPE DHT21 // DHT 21 (AM2301)
const unsigned char ha_lg [] = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80,
0xC0, 0xC0, 0xC0, 0xC0, 0xC0, 0xC0, 0xE0, 0xE0, 0xC0, 0x80, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0xC0, 0xC0, 0x80, 0x00, 0x00, 0x00, 0x00, 0x07, 0x1F, 0xFF, 0xF3, 0x87, 0x87, 0xC7,
0xC6, 0xEE, 0xFC, 0xFC, 0xFE, 0xFF, 0x3F, 0x18, 0x19, 0x3B, 0x37, 0x3E, 0xBC, 0xF8, 0xF8, 0xF8,
0xF0, 0x60, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0xF0, 0xFF, 0xBF, 0xC3, 0xE7, 0x7E, 0x7C, 0x7C, 0x7C, 0xFC, 0xCE, 0x87, 0xFF, 0xFF, 0xFD, 0x9E,
0x87, 0xF9, 0xFF, 0x1F, 0x80, 0xC0, 0xE0, 0x70, 0xF8, 0xFE, 0x7F, 0x1F, 0x07, 0x01, 0x07, 0x3F,
0xFC, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0xDE, 0xC0,
0xC0, 0xC0, 0xC0, 0xDF, 0xFF, 0xFF, 0xFF, 0x00, 0xC0, 0xE0, 0xF0, 0x70, 0x38, 0x38, 0x38, 0x78,
0xF0, 0xE0, 0xC0, 0x00, 0xE0, 0xF0, 0xF0, 0x78, 0x38, 0x38, 0x78, 0x70, 0x70, 0x00, 0x00, 0x80,
0xE0, 0xF8, 0xFE, 0x3F, 0x3F, 0xFF, 0xFC, 0xE0, 0x80, 0x00, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0x87,
0x87, 0x87, 0xCF, 0xCE, 0xFE, 0xFC, 0x78, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0x7F, 0xFC, 0xF0, 0xC0,
0x80, 0xE0, 0xF8, 0xFE, 0x3F, 0xFF, 0xFF, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1F,
0xFF, 0xF1, 0x81, 0x00, 0x80, 0xC0, 0xF0, 0x78, 0x1E, 0x8F, 0xC3, 0xC7, 0xEE, 0x7F, 0xFF, 0xFF,
0xFF, 0x3E, 0x37, 0xF3, 0xF1, 0x3C, 0x3F, 0x37, 0x31, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x31,
0x3F, 0x3F, 0x38, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x3D, 0x01, 0x01,
0x01, 0x01, 0x3D, 0x3F, 0x3F, 0x3F, 0x00, 0x07, 0x0F, 0x1F, 0x3C, 0x38, 0x38, 0x38, 0x3C, 0x1F,
0x1F, 0x07, 0x00, 0x0F, 0x1F, 0x1F, 0x38, 0x38, 0x38, 0x38, 0x1C, 0x1C, 0x30, 0x3E, 0x3F, 0x1F,
0x07, 0x07, 0x07, 0x07, 0x07, 0x07, 0x1F, 0x3F, 0x3E, 0x30, 0x00, 0x3F, 0x3F, 0x3F, 0x03, 0x03,
0x07, 0x0F, 0x1F, 0x3F, 0x38, 0x30, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x00, 0x01, 0x07, 0x1F, 0x1F,
0x0F, 0x03, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1D,
0x3F, 0x3F, 0x3E, 0x3F, 0x3F, 0x36, 0x37, 0x33, 0x31, 0x71, 0x70, 0x60, 0x60, 0xE1, 0xFF, 0xFF,
0xFC, 0x6F, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
};
int humDHT;
int tempDHT;
int lumen;
int soilMoist;
// Khởi tạo cảm biến
DHT dht(DHTPIN, DHTTYPE);
// Khởi tạo LCD
homephone lcd (PD_1, PD_2, PD_3, PE_1, PE_2);
void setup() {
// Khởi tạo cổng serial baud 115200
Serial.begin(115200);
Serial.println("HocARM NDTR Bot!");
// Bắt đầu đọc dữ liệu
dht.begin();
lcd.begin(); //Khởi tạo LCD
lcd.setContrast(0x0A); //Đặt độ tương phản
lcd.clear(); //Xóa màn hình
lcd.drawBitmap(0, 0, 127, 63, ha_lg, black); // Hiển thị hình bitmap
lcd.display();
}
void loop() {
delay(2000);
readSensors();
printData();
showDataLCD();
}
int getLumen(int anaPin)
{
int anaValue = 0;
for (int i = 0; i < 10; i++) // Đọc giá trị cảm biến 10 lần và lấy giá trị trung bình
{
anaValue += analogRead(anaPin);
delay(50);
}
anaValue = anaValue / 10;
anaValue = map(anaValue, 4095, 0, 0, 100); //Tối:0 ==> Sáng 100%
return anaValue;
}
int getSoilMoist()
{
int i = 0;
int anaValue = 0;
for (i = 0; i < 10; i++) //
{
anaValue += analogRead(SOIL_MOIST_1_PIN); //Đọc giá trị cảm biến độ ẩm đất
delay(50); // Đợi đọc giá trị ADC
}
anaValue = anaValue / (i);
anaValue = map(anaValue, 4095, 0, 0, 100); //Ít nước:0% ==> Nhiều nước 100%
return anaValue;
}
void readSensors(void)
{
tempDHT = dht.readTemperature(); //Đọc nhiệt độ DHT22
humDHT = dht.readHumidity(); //Đọc độ ẩm DHT22
lumen = getLumen(LDR_PIN); //Đọc ánh sáng
soilMoist = getSoilMoist(); //Đọc cảm biến độ ẩm đất
}
void showDataLCD(void)
{
lcd.clear(); //Xóa màn hình
lcd.setTextColor(black, white);
lcd.setCursor(0, 0); //đặt con trỏ vào tọa độ (0,0)
lcd.print("**-HOCARM NDTR Bot-**");
lcd.setCursor (0, 10);
lcd.print("---------------------");
lcd.setCursor (0, 20);
lcd.print("Nhdo: ");
lcd.print(tempDHT);
lcd.print("oC Doam: ");
lcd.print(humDHT);
lcd.print("% ");
lcd.setCursor (0, 30);
lcd.print("Asag: ");
lcd.print(lumen);
lcd.print("%");
lcd.print(" Amdat: ");
lcd.print(soilMoist);
lcd.print("%");
lcd.display();
}
void printData(void)
{
// IN thông tin ra màn hình
Serial.print("Do am: ");
Serial.print(humDHT);
Serial.print(" %\t");
Serial.print("Nhiet do: ");
Serial.print(tempDHT);
Serial.print(" *C\t");
Serial.print("Anh sang: ");
Serial.print(lumen);
Serial.print(" %\t");
Serial.print("Do am dat: ");
Serial.print(soilMoist);
Serial.println(" %");
}Kết quả

Thêm Relay và nút nhấn
Vậy là mình đã đọc được dữ liệu từ các cảm biến và hiển thị được thông tin lên serial và LCD. Coi như các thông số đã nằm trong tay chúng ta, giờ mình muốn thêm chức năng điều khiển bơm tưới nước và bơm trừ sâu bằng tay thì phải làm thế nào ? Thôi thì cải tiến thêm chút nữa.
Ở đây mình sử dụng modul 2 Relay và 2 nút nhấn có sẵn trên kit để điều khiển bơm nước và bơm thuốc trừ sâu
Nói qua về Modul relay này có 4 chân cần quan tâm là 2 chân nguồn (5V) và 2 chân cho việc điều khiển là IN1, IN2
- GND
- IN1
- IN2
- VCC
6 chân output của modul dành cho 2 relay, mỗi relay 3 chân là NO(Normal Open),Ref(Reference) và NC(Normanl Closed), mà ta hay quen gọi là tiếp điểm thường đóng, thường mở. Thông thường sử dụng NO và Ref để nối với nguồn 220V. Ngoài ra trên modul còn có 2 LED báo hiệu hoạt động của relay.Vì mình không có bơm nước cũng như bơm thuốc sâu nên phần output chỉ là điều khiển đóng/ cắt relay thôi.
Để điều khiển được 2 bơm hoạt động một cách thủ công thì mình cần có 2 nút nhấn để điều khiển, 2 nút nhấn này sẽ được hoạt động dựa trên trạng thái của bơm. Nghĩa là như thế nào ?
- Giả sử ban đầu bơm nước chưa hoạt động, trạng thái của bơm sẽ là mức 0, khi có người nhấn nút sẽ kiểm tra trạng thái này, nếu đúng là 0 thì sẽ thực hiện “BẬT”
- Ngược lại sẽ thực hiện “TẮT”
Mỗi khi chúng ta chạy vòng loop() thì hàm readLocalCmd() sẽ được thực hiện kiểm tra xem nút nhấn có được nhấn không, sau đó cập nhật trạng thái của các bơm (2 biến là pumpWaterStatus và pumpPesStatus). Hàm debounce(pin) được dùng thay thế hàm digitalRead(pin) nhằm mục đích hạn chế việc đọc sai từ nút nhấn.
Khi nút nhấn được ấn, thì một hàm khác được gọi là hàm applyCmd(). Hàm này sẽ dựa trên trạng thái của bơm hiện có để thực hiện BẬT hoặc TẮT các bơm.
Mình thử chương trình ấn nút điều khiển bơm trước khi ghép vào chung với chương trình đọc cảm biến, ở đây mình tận dụng sẵn 2 nút bấm PF0 và PF4 có trên kit TIVA C luôn cho đỡ tốn dây nối ?
/* Chương trình đọc nhiệt độ, độ ẩm từ cảm biến DHT
Thêm chức năng đọc cảm biến ánh sáng
Thêm chức năng đọc cảm biến độ ẩm đất
Thêm hiển thị LCD
HocARM NDTR BOT by hocARM.org
-------------------------------------------------
Kết nối
DHT | TIVA C
--------------------
VCC(1) | 3.3V
DATA(2) | PD0
NC(3) | x
GND(4) | GND
Kết nối chân 1 của DHT với 3.3V
Chân 2 kết nối với bất kỳ chân nào của TIVA C
Chân 4 nối với GND
Nối trở 10k giữa chân 1 và chân 2
------------------------------------------
So thu tu GLCD và kết nối với TIVA
// Pin | Chuc nang | TIVA C
//------------------------------------------
// 1 | GND | GND
// 2 | RST | PE1
// 3 | SCK | PD2
// 4 | A0(C/D) | PD3
// 5 | LED K+ (3.3V) | 3.3V
// 6 | LED A (GND) | GND
// 7 | SDA | PD1
// 8 | CS | PE2
// 9 | VCC | 3.3V
// 10 | GND | GND
Sử dụng 2 nút nhấn có sẵn trên TIVA (PF4 và PF0)
Sử dụng 2 LED là GREEN và BLUE
*/
#include "DHT.h"
#include "homephone.h"
#define DHTPIN PD_0 // Chân DATA nối với PD0
#define LDR_PIN PE_3 // Chân PE3 nối với chân OUT cảm biến as
#define SOIL_MOIST_1_PIN PE_4 // Chân PE4 nối với cảm biến độ ẩm
// Relay, nút nhấn
#define PUMPW_ON PF_4 //Nút có sẵn trên kit
#define PUMPW_PIN PF_2
#define PUMPS_ON PF_0 //Nút có sẵn trên kit
#define PUMPS_PIN PF_3
// Uncomment loại cảm biến bạn sử dụng, nếu DHT11 thì uncomment DHT11 và comment DHT22
//#define DHTTYPE DHT11 // DHT 11
#define DHTTYPE DHT22 // DHT 22 (AM2302), AM2321
//#define DHTTYPE DHT21 // DHT 21 (AM2301)
const unsigned char ha_lg [] = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80,
0xC0, 0xC0, 0xC0, 0xC0, 0xC0, 0xC0, 0xE0, 0xE0, 0xC0, 0x80, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0xC0, 0xC0, 0x80, 0x00, 0x00, 0x00, 0x00, 0x07, 0x1F, 0xFF, 0xF3, 0x87, 0x87, 0xC7,
0xC6, 0xEE, 0xFC, 0xFC, 0xFE, 0xFF, 0x3F, 0x18, 0x19, 0x3B, 0x37, 0x3E, 0xBC, 0xF8, 0xF8, 0xF8,
0xF0, 0x60, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0xF0, 0xFF, 0xBF, 0xC3, 0xE7, 0x7E, 0x7C, 0x7C, 0x7C, 0xFC, 0xCE, 0x87, 0xFF, 0xFF, 0xFD, 0x9E,
0x87, 0xF9, 0xFF, 0x1F, 0x80, 0xC0, 0xE0, 0x70, 0xF8, 0xFE, 0x7F, 0x1F, 0x07, 0x01, 0x07, 0x3F,
0xFC, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0xDE, 0xC0,
0xC0, 0xC0, 0xC0, 0xDF, 0xFF, 0xFF, 0xFF, 0x00, 0xC0, 0xE0, 0xF0, 0x70, 0x38, 0x38, 0x38, 0x78,
0xF0, 0xE0, 0xC0, 0x00, 0xE0, 0xF0, 0xF0, 0x78, 0x38, 0x38, 0x78, 0x70, 0x70, 0x00, 0x00, 0x80,
0xE0, 0xF8, 0xFE, 0x3F, 0x3F, 0xFF, 0xFC, 0xE0, 0x80, 0x00, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0x87,
0x87, 0x87, 0xCF, 0xCE, 0xFE, 0xFC, 0x78, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0x7F, 0xFC, 0xF0, 0xC0,
0x80, 0xE0, 0xF8, 0xFE, 0x3F, 0xFF, 0xFF, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1F,
0xFF, 0xF1, 0x81, 0x00, 0x80, 0xC0, 0xF0, 0x78, 0x1E, 0x8F, 0xC3, 0xC7, 0xEE, 0x7F, 0xFF, 0xFF,
0xFF, 0x3E, 0x37, 0xF3, 0xF1, 0x3C, 0x3F, 0x37, 0x31, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x31,
0x3F, 0x3F, 0x38, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x3D, 0x01, 0x01,
0x01, 0x01, 0x3D, 0x3F, 0x3F, 0x3F, 0x00, 0x07, 0x0F, 0x1F, 0x3C, 0x38, 0x38, 0x38, 0x3C, 0x1F,
0x1F, 0x07, 0x00, 0x0F, 0x1F, 0x1F, 0x38, 0x38, 0x38, 0x38, 0x1C, 0x1C, 0x30, 0x3E, 0x3F, 0x1F,
0x07, 0x07, 0x07, 0x07, 0x07, 0x07, 0x1F, 0x3F, 0x3E, 0x30, 0x00, 0x3F, 0x3F, 0x3F, 0x03, 0x03,
0x07, 0x0F, 0x1F, 0x3F, 0x38, 0x30, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x00, 0x01, 0x07, 0x1F, 0x1F,
0x0F, 0x03, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1D,
0x3F, 0x3F, 0x3E, 0x3F, 0x3F, 0x36, 0x37, 0x33, 0x31, 0x71, 0x70, 0x60, 0x60, 0xE1, 0xFF, 0xFF,
0xFC, 0x6F, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
};
// Biến lưu các giá trị cảm biến
int humDHT;
int tempDHT;
int lumen;
int soilMoist;
// Biến lưu trạng thái bơm
boolean pumpWaterStatus = 0;
boolean pumpPesStatus = 0;
int timePumpOn = 10; // Thời gian bật bơm nước
// Khởi tạo cảm biến
DHT dht(DHTPIN, DHTTYPE);
// Khởi tạo LCD
homephone lcd (PD_1, PD_2, PD_3, PE_1, PE_2);
void setup() {
pinMode(PUMPW_PIN, OUTPUT);
pinMode(PUMPS_PIN, OUTPUT);
pinMode(PUMPW_ON, INPUT_PULLUP);
pinMode(PUMPS_ON, INPUT_PULLUP);
// Khởi tạo cổng serial baud 115200
Serial.begin(115200);
Serial.println("HocARM NDTR Bot!");
// Bắt đầu đọc dữ liệu
dht.begin();
lcd.begin(); //Khởi tạo LCD
lcd.setContrast(0x0A); //Đặt độ tương phản
lcd.clear(); //Xóa màn hình
lcd.drawBitmap(0, 0, 127, 63, ha_lg, black); // Hiển thị hình bitmap
lcd.display();
}
void loop() {
readSensors();
// printData();
readLocalCmd();
showDataLCD();
}
int getLumen(int anaPin)
{
int anaValue = 0;
for (int i = 0; i < 10; i++) // Đọc giá trị cảm biến 10 lần và lấy giá trị trung bình
{
anaValue += analogRead(anaPin);
delay(50);
}
anaValue = anaValue / 10;
anaValue = map(anaValue, 4095, 0, 0, 100); //Tối:0 ==> Sáng 100%
return anaValue;
}
int getSoilMoist()
{
int i = 0;
int anaValue = 0;
for (i = 0; i < 10; i++) //
{
anaValue += analogRead(SOIL_MOIST_1_PIN); //Đọc giá trị cảm biến độ ẩm đất
delay(50); // Đợi đọc giá trị ADC
}
anaValue = anaValue / (i);
anaValue = map(anaValue, 4095, 0, 0, 100); //Ít nước:0% ==> Nhiều nước 100%
return anaValue;
}
void readSensors(void)
{
tempDHT = dht.readTemperature(); //Đọc nhiệt độ DHT22
humDHT = dht.readHumidity(); //Đọc độ ẩm DHT22
lumen = getLumen(LDR_PIN); //Đọc ánh sáng
soilMoist = getSoilMoist(); //Đọc cảm biến độ ẩm đất
}
void showDataLCD(void)
{
lcd.clear(); //Xóa màn hình
lcd.setTextColor(black, white);
lcd.setCursor(0, 0); //đặt con trỏ vào tọa độ (0,0)
lcd.print("**-HOCARM NDTR Bot-**");
lcd.setCursor (0, 10);
lcd.print("---------------------");
lcd.setCursor (0, 20);
lcd.print("Nhdo: ");
lcd.print(tempDHT);
lcd.print("oC Doam: ");
lcd.print(humDHT);
lcd.print("% ");
lcd.setCursor (0, 30);
lcd.print("Asag: ");
lcd.print(lumen);
lcd.print("%");
lcd.print(" Amdat: ");
lcd.print(soilMoist);
lcd.print("%");
lcd.setCursor (0, 40);
lcd.print("BomN: ");
lcd.print(pumpWaterStatus);
lcd.print(" BomS: ");
lcd.print(pumpPesStatus);
lcd.display();
lcd.setCursor (0, 0);
lcd.display();
}
void printData(void)
{
// IN thông tin ra màn hình
Serial.print("Do am: ");
Serial.print(humDHT);
Serial.print(" %\t");
Serial.print("Nhiet do: ");
Serial.print(tempDHT);
Serial.print(" *C\t");
Serial.print("Anh sang: ");
Serial.print(lumen);
Serial.print(" %\t");
Serial.print("Do am dat: ");
Serial.print(soilMoist);
Serial.println(" %");
}
/***************************************************
Hàm bật bơm nước
****************************************************/
void turnPumpOn()
{
digitalWrite(PUMPW_PIN, HIGH);
pumpWaterStatus = 1;
showDataLCD();
delay (timePumpOn * 1000);
digitalWrite(PUMPW_PIN, LOW);
pumpWaterStatus = 0;
showDataLCD();
}
/****************************************************************
Hàm đọc trạng thái bơm và kiểm tra nút nhấn
(Nút nhấn mặc định là mức "CAO"):
****************************************************************/
void readLocalCmd()
{
int digiValue = debounce(PUMPW_ON);
if (!digiValue)
{
pumpWaterStatus = !pumpWaterStatus;
showDataLCD();
aplyCmd();
}
digiValue = debounce(PUMPS_ON);
if (!digiValue)
{
pumpPesStatus = !pumpPesStatus;
showDataLCD();
aplyCmd();
}
}
/***************************************************
Thực hiện điều khiển các bơm
****************************************************/
void aplyCmd()
{
if (pumpWaterStatus == 1) digitalWrite(PUMPW_PIN, HIGH);
if (pumpWaterStatus == 0) digitalWrite(PUMPW_PIN, LOW);
if (pumpPesStatus == 1) digitalWrite(PUMPS_PIN, HIGH);
if (pumpPesStatus == 0) digitalWrite(PUMPS_PIN, LOW);
}
/***************************************************
Hàm kiểm tra trạng thái phím bấm
****************************************************/
boolean debounce(int pin)
{
boolean state;
boolean previousState;
const int debounceDelay = 60;
previousState = digitalRead(pin);
for (int counter = 0; counter < debounceDelay; counter++)
{
delay(1);
state = digitalRead(pin);
if (state != previousState)
{
counter = 0;
previousState = state;
}
}
return state;
}Kết quả
Ở đây mình dùng 2 đèn báo hiệu có sẵn trên kit mô phỏng cho 2 relay hoạt động, các bạn có thể thấy mình ấn nút khá lâu thì mới nhận, mình sẽ khắc phục cái này ở chương trình chạy offline thủ công
Hệ thống chạy offline thủ công
Kiểm tra từng cái hơi vất vả, chúc mừng bạn nếu đã cố gắng được tới đây, phần trên mình đã làm được 3 nhiệm vụ “lớn”
- Đọc được tất cả các cảm biến
- Điều khiển được các bơm thủ công thông qua nút nhấn
- Hiển thị thông tin lên LCD và máy tính
Với các tín hiệu như nhiệt độ, độ ẩm, thì thường phải đợi khoảng 2s, nếu thời gian có tăng lên 1 phút thì cũng không vấn đề gì lắm, ngoài ra tín hiệu về ánh sáng, độ ẩm đất cũng không yêu cầu quá khắt khe về thời gian. Nhưng với các bơm thì cần phải được điều khiển cũng như đọc trạng thái nhanh chóng, ví dụ như nếu đọc trạng thái không đúng thì nhiều lúc tưởng đã bơm rồi nhưng thực ra chưa bơm -> cây chết, hoặc tưởng đã tắt bơm nhưng chưa tắt, dẫn tới bơm quá nhiều nước -> ngập úng -> cây chết.
Do đó ở đây mình sẽ sử dụng hàm millis(), hàm này có chức năng tương tự như timer để định thời gian bao nhiêu lâu thì làm lại một nhiệm vụ.
Ở đây trong vòng loop() mình sẽ luôn kiểm tra xem nút nhấn có được ấn hay không, và thực hiện 50s lấy dữ liệu từ các cảm biến 1 lần. Bằng cách này có thể khắc phục được phần nào hiện tượng ấn phím một lúc mới nhận mình đã nói ở trên
Chương trình để thực hiện lấy dữ liệu 5s/lần.
Giờ là lúc ghép nối toàn bộ những gì đã làm bên trên thành một và xem kết quả để lấy động lực chiến đấu tiếp.
Lưu ý:
Các bạn lưu ý là mình có một số thay đổi mức ở hàm aplyCmd() từ mức LOW đổi thành HIGH và ngược lại, sở dĩ phải đổi vì modul relay đang dùng hoạt động khi kích mức LOW
Ngoài ra mình đổi chân PUMPW_PIN và PUMPS_PIN về PC6 và chân PC7
/* Chương trình đọc nhiệt độ, độ ẩm từ cảm biến DHT
Thêm chức năng đọc cảm biến ánh sáng
Thêm chức năng đọc cảm biến độ ẩm đất
Thêm hiển thị LCD
HocARM NDTR BOT by hocARM.org
-------------------------------------------------
Kết nối
DHT | TIVA C
--------------------
VCC(1) | 3.3V
DATA(2) | PD0
NC(3) | x
GND(4) | GND
Kết nối chân 1 của DHT với 3.3V
Chân 2 kết nối với bất kỳ chân nào của TIVA C
Chân 4 nối với GND
Nối trở 10k giữa chân 1 và chân 2
------------------------------------------
So thu tu GLCD và kết nối với TIVA
// Pin | Chuc nang | TIVA C
//------------------------------------------
// 1 | GND | GND
// 2 | RST | PE1
// 3 | SCK | PD2
// 4 | A0(C/D) | PD3
// 5 | LED K+ (3.3V) | 3.3V
// 6 | LED A (GND) | GND
// 7 | SDA | PD1
// 8 | CS | PE2
// 9 | VCC | 3.3V
// 10 | GND | GND
Sử dụng 2 nút nhấn có sẵn trên TIVA (PF4 và PF0)
Sử dụng 2 chân PC6 và PC7 nối với Modul 2 Relay
Lưu ý GND Relay nối với GND của TIVA C
*/
#include "DHT.h"
#include "homephone.h"
#define DHTPIN PD_0 // Chân DATA nối với PD0
#define LDR_PIN PE_3 // Chân PE3 nối với chân OUT cảm biến as
#define SOIL_MOIST_1_PIN PE_4 // Chân PE4 nối với cảm biến độ ẩm
// Relay, nút nhấn
#define PUMPW_ON PF_4 //Nút có sẵn trên kit
#define PUMPW_PIN PC_6
#define PUMPS_ON PF_0 //Nút có sẵn trên kit
#define PUMPS_PIN PC_7
// Uncomment loại cảm biến bạn sử dụng, nếu DHT11 thì uncomment DHT11 và comment DHT22
//#define DHTTYPE DHT11 // DHT 11
#define DHTTYPE DHT22 // DHT 22 (AM2302), AM2321
//#define DHTTYPE DHT21 // DHT 21 (AM2301)
const unsigned char ha_lg [] = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80,
0xC0, 0xC0, 0xC0, 0xC0, 0xC0, 0xC0, 0xE0, 0xE0, 0xC0, 0x80, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0xC0, 0xC0, 0x80, 0x00, 0x00, 0x00, 0x00, 0x07, 0x1F, 0xFF, 0xF3, 0x87, 0x87, 0xC7,
0xC6, 0xEE, 0xFC, 0xFC, 0xFE, 0xFF, 0x3F, 0x18, 0x19, 0x3B, 0x37, 0x3E, 0xBC, 0xF8, 0xF8, 0xF8,
0xF0, 0x60, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0xF0, 0xFF, 0xBF, 0xC3, 0xE7, 0x7E, 0x7C, 0x7C, 0x7C, 0xFC, 0xCE, 0x87, 0xFF, 0xFF, 0xFD, 0x9E,
0x87, 0xF9, 0xFF, 0x1F, 0x80, 0xC0, 0xE0, 0x70, 0xF8, 0xFE, 0x7F, 0x1F, 0x07, 0x01, 0x07, 0x3F,
0xFC, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0xDE, 0xC0,
0xC0, 0xC0, 0xC0, 0xDF, 0xFF, 0xFF, 0xFF, 0x00, 0xC0, 0xE0, 0xF0, 0x70, 0x38, 0x38, 0x38, 0x78,
0xF0, 0xE0, 0xC0, 0x00, 0xE0, 0xF0, 0xF0, 0x78, 0x38, 0x38, 0x78, 0x70, 0x70, 0x00, 0x00, 0x80,
0xE0, 0xF8, 0xFE, 0x3F, 0x3F, 0xFF, 0xFC, 0xE0, 0x80, 0x00, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0x87,
0x87, 0x87, 0xCF, 0xCE, 0xFE, 0xFC, 0x78, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0x7F, 0xFC, 0xF0, 0xC0,
0x80, 0xE0, 0xF8, 0xFE, 0x3F, 0xFF, 0xFF, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1F,
0xFF, 0xF1, 0x81, 0x00, 0x80, 0xC0, 0xF0, 0x78, 0x1E, 0x8F, 0xC3, 0xC7, 0xEE, 0x7F, 0xFF, 0xFF,
0xFF, 0x3E, 0x37, 0xF3, 0xF1, 0x3C, 0x3F, 0x37, 0x31, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x31,
0x3F, 0x3F, 0x38, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x3D, 0x01, 0x01,
0x01, 0x01, 0x3D, 0x3F, 0x3F, 0x3F, 0x00, 0x07, 0x0F, 0x1F, 0x3C, 0x38, 0x38, 0x38, 0x3C, 0x1F,
0x1F, 0x07, 0x00, 0x0F, 0x1F, 0x1F, 0x38, 0x38, 0x38, 0x38, 0x1C, 0x1C, 0x30, 0x3E, 0x3F, 0x1F,
0x07, 0x07, 0x07, 0x07, 0x07, 0x07, 0x1F, 0x3F, 0x3E, 0x30, 0x00, 0x3F, 0x3F, 0x3F, 0x03, 0x03,
0x07, 0x0F, 0x1F, 0x3F, 0x38, 0x30, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x00, 0x01, 0x07, 0x1F, 0x1F,
0x0F, 0x03, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1D,
0x3F, 0x3F, 0x3E, 0x3F, 0x3F, 0x36, 0x37, 0x33, 0x31, 0x71, 0x70, 0x60, 0x60, 0xE1, 0xFF, 0xFF,
0xFC, 0x6F, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
};
// Biến lưu các giá trị cảm biến
int humDHT;
int tempDHT;
int lumen;
int soilMoist;
// Biến lưu trạng thái bơm
boolean pumpWaterStatus = 0;
boolean pumpPesStatus = 0;
// Biến cho timer
long sampleTimingSeconds = 50; // ==> Thời gian đọc cảm biến (s)
long startTiming = 0;
long elapsedTime = 0;
// Khởi tạo cảm biến
DHT dht(DHTPIN, DHTTYPE);
// Khởi tạo LCD
homephone lcd (PD_1, PD_2, PD_3, PE_1, PE_2);
void setup() {
pinMode(PUMPW_PIN, OUTPUT);
pinMode(PUMPS_PIN, OUTPUT);
pinMode(PUMPW_ON, INPUT_PULLUP);
pinMode(PUMPS_ON, INPUT_PULLUP);
// Khởi tạo cổng serial baud 115200
Serial.begin(115200);
Serial.println("HocARM NDTR Bot!");
// Bắt đầu đọc dữ liệu
dht.begin();
lcd.begin(); //Khởi tạo LCD
lcd.setContrast(0x0A); //Đặt độ tương phản
lcd.clear(); //Xóa màn hình
lcd.drawBitmap(0, 0, 127, 63, ha_lg, black); // Hiển thị hình bitmap
lcd.display();
readSensors(); // Khởi tạo đọc cảm biến
startTiming = millis(); // Bắt đầu đếm thời gian
lcd.clear();
}
void loop() {
// Khởi tạo timer
elapsedTime = millis() - startTiming;
readLocalCmd();
showDataLCD();
if (elapsedTime > (sampleTimingSeconds * 1000))
{
readSensors();
printData();
startTiming = millis();
}
}
int getLumen(int anaPin)
{
int anaValue = 0;
for (int i = 0; i < 10; i++) // Đọc giá trị cảm biến 10 lần và lấy giá trị trung bình
{
anaValue += analogRead(anaPin);
delay(50);
}
anaValue = anaValue / 10;
anaValue = map(anaValue, 4095, 0, 0, 100); //Tối:0 ==> Sáng 100%
return anaValue;
}
int getSoilMoist()
{
int i = 0;
int anaValue = 0;
for (i = 0; i < 10; i++) //
{
anaValue += analogRead(SOIL_MOIST_1_PIN); //Đọc giá trị cảm biến độ ẩm đất
delay(50); // Đợi đọc giá trị ADC
}
anaValue = anaValue / (i);
anaValue = map(anaValue, 4095, 0, 0, 100); //Ít nước:0% ==> Nhiều nước 100%
return anaValue;
}
void readSensors(void)
{
tempDHT = dht.readTemperature(); //Đọc nhiệt độ DHT22
humDHT = dht.readHumidity(); //Đọc độ ẩm DHT22
lumen = getLumen(LDR_PIN); //Đọc ánh sáng
soilMoist = getSoilMoist(); //Đọc cảm biến độ ẩm đất
}
void showDataLCD(void)
{
lcd.setTextColor(black, white);
lcd.setCursor(0, 0); //đặt con trỏ vào tọa độ (0,0)
lcd.print("**-HOCARM NDTR Bot-**");
lcd.setCursor (0, 10);
lcd.print("---------------------");
lcd.setCursor (0, 20);
lcd.print("Nhdo: ");
lcd.print(tempDHT);
lcd.print("oC Doam: ");
lcd.print(humDHT);
lcd.print("% ");
lcd.setCursor (0, 30);
lcd.print("Asag: ");
lcd.print(lumen);
lcd.print("%");
lcd.print(" Amdat: ");
lcd.print(soilMoist);
lcd.print("%");
lcd.setCursor (0, 40);
lcd.print("BomN: ");
lcd.print(pumpWaterStatus);
lcd.print(" BomS: ");
lcd.print(pumpPesStatus);
lcd.display();
lcd.setCursor (0, 0);
lcd.display();
}
void printData(void)
{
// IN thông tin ra màn hình
Serial.print("Do am: ");
Serial.print(humDHT);
Serial.print(" %\t");
Serial.print("Nhiet do: ");
Serial.print(tempDHT);
Serial.print(" *C\t");
Serial.print("Anh sang: ");
Serial.print(lumen);
Serial.print(" %\t");
Serial.print("Do am dat: ");
Serial.print(soilMoist);
Serial.println(" %");
}
/****************************************************************
Hàm đọc trạng thái bơm và kiểm tra nút nhấn
(Nút nhấn mặc định là mức "CAO"):
****************************************************************/
void readLocalCmd()
{
int digiValue = debounce(PUMPW_ON);
if (!digiValue)
{
pumpWaterStatus = !pumpWaterStatus;
showDataLCD();
aplyCmd();
}
digiValue = debounce(PUMPS_ON);
if (!digiValue)
{
pumpPesStatus = !pumpPesStatus;
showDataLCD();
aplyCmd();
}
}
/***************************************************
Thực hiện điều khiển các bơm
****************************************************/
void aplyCmd()
{
if (pumpWaterStatus == 1) digitalWrite(PUMPW_PIN, LOW);
if (pumpWaterStatus == 0) digitalWrite(PUMPW_PIN, HIGH);
if (pumpPesStatus == 1) digitalWrite(PUMPS_PIN, LOW);
if (pumpPesStatus == 0) digitalWrite(PUMPS_PIN, HIGH);
}
/***************************************************
Hàm kiểm tra trạng thái phím bấm
****************************************************/
boolean debounce(int pin)
{
boolean state;
boolean previousState;
const int debounceDelay = 60;
previousState = digitalRead(pin);
for (int counter = 0; counter < debounceDelay; counter++)
{
delay(1);
state = digitalRead(pin);
if (state != previousState)
{
counter = 0;
previousState = state;
}
}
return state;
}Kết quả
Hệ thống chạy offline tự động
Khi đã đọc được dữ liệu cảm biến và điều khiển thủ công bơm được rồi thì một yêu cầu mới lại đặt ra là tại sao lại phải bấm nút điều khiển bơm bằng tay nhỉ ? Không lẽ lại ngồi soi từng thông số, kiểm tra các thông số rồi lại ngồi ấn nút để bơm thì đúng là quá vất vả, thế thì chắc vứt luôn cái này đi cho rồi.
Đằng nào cũng đã cố tới đây rồi thì ráng làm cho con Bot này thông minh hơn một chút, ta tận dụng thông tin dữ liệu nhận được để bắt hệ thống tự tưới tiêu khi đất khô quá, khi nóng quá, tự tưới nước hoặc bón phân vào buổi sáng chẳng hạn,.. Dưới đây là một số thông số cơ bản để có thể dựa vào (thực tế thì thông số này có thể thay đổi)
Cảm biến độ ẩm đất
- Ẩm ướt : trên 60%
- Ổn định: 40% – 60%
- Khô: Dưới 40% (cần phải tưới nước)
Nhiệt độ
- Lạnh: Dưới 15oC
- Trung bình: 20oC – 25oC
- Nóng: 25oC trở lên
Ánh sáng
- Tối: dưới 40% (không bơm nước tưới)
- Sáng: trên 40%
Lưu ý:
Các thông số mình đưa ra dựa trên quan sát môi trường thực tế của mình, chưa cần sử dụng thông số về nhiệt độ. Nếu cây trồng của bạn yêu cầu đòi hỏi phát triển cần có nhiệt độ thì ko nên bỏ qua cái này.
Muốn thông số điều khiển chính xác thì cần thử nghiệm trong thời gian dài để lấy ra được giá trị chính xác
Có các thông số rồi mình sẽ lưu nó vào các biến trong chương trình của mình như sau
Với cảm biến DHT
- int tempDHT;
- int HOT_TEMP = 25;
- int COLD_TEMP = 15;
Với cảm biến ánh sáng
- int lumen;
- int DARK_LIGHT = 40;
Với cảm biến độ ẩm đất
- int soilMoist;
- int DRY_SOIL = 40;
- int WET_SOIL = 60;
Dựa trên các định nghĩa trên thì sẽ có ban đầu sẽ có một số cách điều khiển đơn giản dựa trên độ ẩm đất và ánh sáng (phần nhiệt độ cứ để đó dự phòng)
- Nếu khô và trời sáng -> bơm nước
- Nếu khô và trời tối -> không bơm nước
Mình viết thêm một hàm để thực hiện nhiệm vụ tưới tiêu tự động là autoControlPlantation() hàm này có nhiệm vụ là điều khiển bơm tưới nước dựa trên độ ẩm và ánh sáng
Ở trong chương trình có hàm turnPumpOn() có tác dụng bật tắt bơm, ở đây mình điều khiển bật tắt theo thời gian định sẵn, nghĩa là nếu đất khô quá thì mình sẽ bơm nước trong 1 phút rồi tắt (sau 1ph bơm nước nếu độ ẩm vẫn chưa đủ thì tiếp tục bơm), thời gian bơm này có thể thay đổi bằng cách đổi thông số timePumpOn , đồng thời mình sẽ cho hiển thị thông tin này lên LCD luôn.
Gom hết lại toàn bộ tiếp tục thử nghiệm xem kết quả thế nào
/* Chương trình đọc nhiệt độ, độ ẩm từ cảm biến DHT
Thêm chức năng đọc cảm biến ánh sáng
Thêm chức năng đọc cảm biến độ ẩm đất
Thêm hiển thị LCD
Thêm chức năng điều khiển tưới tiêu bằng tay 2 bơm
Thêm chức năng điều khiển tự động bơm khi thiếu nước
HocARM NDTR BOT by hocARM.org
-------------------------------------------------
Kết nối
DHT | TIVA C
--------------------
VCC(1) | 3.3V
DATA(2) | PD0
NC(3) | x
GND(4) | GND
Kết nối chân 1 của DHT với 3.3V
Chân 2 kết nối với bất kỳ chân nào của TIVA C
Chân 4 nối với GND
Nối trở 10k giữa chân 1 và chân 2
------------------------------------------
So thu tu GLCD và kết nối với TIVA
// Pin | Chuc nang | TIVA C
//------------------------------------------
// 1 | GND | GND
// 2 | RST | PE1
// 3 | SCK | PD2
// 4 | A0(C/D) | PD3
// 5 | LED K+ (3.3V) | 3.3V
// 6 | LED A (GND) | GND
// 7 | SDA | PD1
// 8 | CS | PE2
// 9 | VCC | 3.3V
// 10 | GND | GND
Sử dụng 2 nút nhấn có sẵn trên TIVA (PF4 và PF0)
Sử dụng 2 chân PC6 và PC7 nối với Modul 2 Relay
Lưu ý GND Relay nối với GND của TIVA C
*/
#include "DHT.h"
#include "homephone.h"
#define DHTPIN PD_0 // Chân DATA nối với PD0
#define LDR_PIN PE_3 // Chân PE3 nối với chân OUT cảm biến as
#define SOIL_MOIST_1_PIN PE_4 // Chân PE4 nối với cảm biến độ ẩm
// Relay, nút nhấn
#define PUMPW_ON PF_4 //Nút có sẵn trên kit
#define PUMPW_PIN PC_6
#define PUMPS_ON PF_0 //Nút có sẵn trên kit
#define PUMPS_PIN PC_7
// Uncomment loại cảm biến bạn sử dụng, nếu DHT11 thì uncomment DHT11 và comment DHT22
//#define DHTTYPE DHT11 // DHT 11
#define DHTTYPE DHT22 // DHT 22 (AM2302), AM2321
//#define DHTTYPE DHT21 // DHT 21 (AM2301)
const unsigned char ha_lg [] = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80,
0xC0, 0xC0, 0xC0, 0xC0, 0xC0, 0xC0, 0xE0, 0xE0, 0xC0, 0x80, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0xC0, 0xC0, 0x80, 0x00, 0x00, 0x00, 0x00, 0x07, 0x1F, 0xFF, 0xF3, 0x87, 0x87, 0xC7,
0xC6, 0xEE, 0xFC, 0xFC, 0xFE, 0xFF, 0x3F, 0x18, 0x19, 0x3B, 0x37, 0x3E, 0xBC, 0xF8, 0xF8, 0xF8,
0xF0, 0x60, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0xF0, 0xFF, 0xBF, 0xC3, 0xE7, 0x7E, 0x7C, 0x7C, 0x7C, 0xFC, 0xCE, 0x87, 0xFF, 0xFF, 0xFD, 0x9E,
0x87, 0xF9, 0xFF, 0x1F, 0x80, 0xC0, 0xE0, 0x70, 0xF8, 0xFE, 0x7F, 0x1F, 0x07, 0x01, 0x07, 0x3F,
0xFC, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0xDE, 0xC0,
0xC0, 0xC0, 0xC0, 0xDF, 0xFF, 0xFF, 0xFF, 0x00, 0xC0, 0xE0, 0xF0, 0x70, 0x38, 0x38, 0x38, 0x78,
0xF0, 0xE0, 0xC0, 0x00, 0xE0, 0xF0, 0xF0, 0x78, 0x38, 0x38, 0x78, 0x70, 0x70, 0x00, 0x00, 0x80,
0xE0, 0xF8, 0xFE, 0x3F, 0x3F, 0xFF, 0xFC, 0xE0, 0x80, 0x00, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0x87,
0x87, 0x87, 0xCF, 0xCE, 0xFE, 0xFC, 0x78, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0x7F, 0xFC, 0xF0, 0xC0,
0x80, 0xE0, 0xF8, 0xFE, 0x3F, 0xFF, 0xFF, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1F,
0xFF, 0xF1, 0x81, 0x00, 0x80, 0xC0, 0xF0, 0x78, 0x1E, 0x8F, 0xC3, 0xC7, 0xEE, 0x7F, 0xFF, 0xFF,
0xFF, 0x3E, 0x37, 0xF3, 0xF1, 0x3C, 0x3F, 0x37, 0x31, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x31,
0x3F, 0x3F, 0x38, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x3D, 0x01, 0x01,
0x01, 0x01, 0x3D, 0x3F, 0x3F, 0x3F, 0x00, 0x07, 0x0F, 0x1F, 0x3C, 0x38, 0x38, 0x38, 0x3C, 0x1F,
0x1F, 0x07, 0x00, 0x0F, 0x1F, 0x1F, 0x38, 0x38, 0x38, 0x38, 0x1C, 0x1C, 0x30, 0x3E, 0x3F, 0x1F,
0x07, 0x07, 0x07, 0x07, 0x07, 0x07, 0x1F, 0x3F, 0x3E, 0x30, 0x00, 0x3F, 0x3F, 0x3F, 0x03, 0x03,
0x07, 0x0F, 0x1F, 0x3F, 0x38, 0x30, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x00, 0x01, 0x07, 0x1F, 0x1F,
0x0F, 0x03, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1D,
0x3F, 0x3F, 0x3E, 0x3F, 0x3F, 0x36, 0x37, 0x33, 0x31, 0x71, 0x70, 0x60, 0x60, 0xE1, 0xFF, 0xFF,
0xFC, 0x6F, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
};
// Biến lưu các giá trị cảm biến
int humDHT;
int tempDHT;
int lumen;
int DARK_LIGHT = 40;
int soilMoist;
int DRY_SOIL = 40;
int WET_SOIL = 60;
// Biến lưu trạng thái bơm
boolean pumpWaterStatus = 0;
boolean pumpPesStatus = 0;
int timePumpOn = 10; // Thời gian bật bơm nước
// Biến cho timer
long sampleTimingSeconds = 50; // ==> Thời gian đọc cảm biến (s)
long startTiming = 0;
long elapsedTime = 0;
// Khởi tạo cảm biến
DHT dht(DHTPIN, DHTTYPE);
// Khởi tạo LCD
homephone lcd (PD_1, PD_2, PD_3, PE_1, PE_2);
void setup() {
pinMode(PUMPW_PIN, OUTPUT);
pinMode(PUMPS_PIN, OUTPUT);
pinMode(PUMPW_ON, INPUT_PULLUP); // Button
pinMode(PUMPS_ON, INPUT_PULLUP); // Button
// Khởi tạo cổng serial baud 115200
Serial.begin(115200);
Serial.println("HocARM NDTR Bot!");
// Bắt đầu đọc dữ liệu
dht.begin();
lcd.begin(); //Khởi tạo LCD
lcd.setContrast(0x0A); //Đặt độ tương phản
lcd.clear(); //Xóa màn hình
lcd.drawBitmap(0, 0, 127, 63, ha_lg, black); // Hiển thị hình bitmap
lcd.display();
readSensors(); // Khởi tạo đọc cảm biến
startTiming = millis(); // Bắt đầu đếm thời gian
lcd.clear();
}
void loop() {
// Khởi tạo timer
elapsedTime = millis() - startTiming;
readLocalCmd();
showDataLCD();
if (elapsedTime > (sampleTimingSeconds * 1000))
{
readSensors();
printData();
autoControlPlantation();
startTiming = millis();
}
}
int getLumen(int anaPin)
{
int anaValue = 0;
for (int i = 0; i < 10; i++) // Đọc giá trị cảm biến 10 lần và lấy giá trị trung bình
{
anaValue += analogRead(anaPin);
delay(50);
}
anaValue = anaValue / 10;
anaValue = map(anaValue, 4095, 0, 0, 100); //Tối:0 ==> Sáng 100%
return anaValue;
}
int getSoilMoist()
{
int i = 0;
int anaValue = 0;
for (i = 0; i < 10; i++) //
{
anaValue += analogRead(SOIL_MOIST_1_PIN); //Đọc giá trị cảm biến độ ẩm đất
delay(50); // Đợi đọc giá trị ADC
}
anaValue = anaValue / (i);
anaValue = map(anaValue, 4095, 0, 0, 100); //Ít nước:0% ==> Nhiều nước 100%
return anaValue;
}
void readSensors(void)
{
tempDHT = dht.readTemperature(); //Đọc nhiệt độ DHT22
humDHT = dht.readHumidity(); //Đọc độ ẩm DHT22
lumen = getLumen(LDR_PIN); //Đọc ánh sáng
soilMoist = getSoilMoist(); //Đọc cảm biến độ ẩm đất
}
void showDataLCD(void)
{
lcd.setTextColor(black, white);
lcd.setCursor(0, 0); //đặt con trỏ vào tọa độ (0,0)
lcd.print("**-HOCARM NDTR Bot-**");
lcd.setCursor (0, 10);
lcd.print("---------------------");
lcd.setCursor (0, 20);
lcd.print("Nhdo: ");
lcd.print(tempDHT);
lcd.print("oC Doam: ");
lcd.print(humDHT);
lcd.print("% ");
lcd.setCursor (0, 30);
lcd.print("Asag: ");
lcd.print(lumen);
lcd.print("%");
lcd.print(" Amdat: ");
lcd.print(soilMoist);
lcd.print("%");
lcd.setCursor (0, 40);
lcd.print("BomN: ");
lcd.print(pumpWaterStatus);
lcd.print(" BomS: ");
lcd.print(pumpPesStatus);
lcd.display();
lcd.setCursor (0, 0);
lcd.display();
}
void printData(void)
{
// IN thông tin ra màn hình
Serial.print("Do am: ");
Serial.print(humDHT);
Serial.print(" %\t");
Serial.print("Nhiet do: ");
Serial.print(tempDHT);
Serial.print(" *C\t");
Serial.print("Anh sang: ");
Serial.print(lumen);
Serial.print(" %\t");
Serial.print("Do am dat: ");
Serial.print(soilMoist);
Serial.println(" %");
}
/***************************************************
Hàm bật bơm nước
****************************************************/
void turnPumpOn()
{
digitalWrite(PUMPW_PIN, LOW);
pumpWaterStatus = 1;
showDataLCD();
delay (timePumpOn * 1000);
digitalWrite(PUMPW_PIN, HIGH);
pumpWaterStatus = 0;
showDataLCD();
}
/****************************************************************
Hàm đọc trạng thái bơm và kiểm tra nút nhấn
(Nút nhấn mặc định là mức "CAO"):
****************************************************************/
void readLocalCmd()
{
int digiValue = debounce(PUMPW_ON);
if (!digiValue)
{
pumpWaterStatus = !pumpWaterStatus;
showDataLCD();
aplyCmd();
}
digiValue = debounce(PUMPS_ON);
if (!digiValue)
{
pumpPesStatus = !pumpPesStatus;
showDataLCD();
aplyCmd();
}
}
/***************************************************
Thực hiện điều khiển các bơm
****************************************************/
void aplyCmd()
{
if (pumpWaterStatus == 1) digitalWrite(PUMPW_PIN, LOW);
if (pumpWaterStatus == 0) digitalWrite(PUMPW_PIN, HIGH);
if (pumpPesStatus == 1) digitalWrite(PUMPS_PIN, LOW);
if (pumpPesStatus == 0) digitalWrite(PUMPS_PIN, HIGH);
}
/***************************************************
Hàm kiểm tra trạng thái phím bấm
****************************************************/
boolean debounce(int pin)
{
boolean state;
boolean previousState;
const int debounceDelay = 60;
previousState = digitalRead(pin);
for (int counter = 0; counter < debounceDelay; counter++)
{
delay(1);
state = digitalRead(pin);
if (state != previousState)
{
counter = 0;
previousState = state;
}
}
return state;
}
/***************************************************
* Chức năng tự động tưới tiêu
****************************************************/
void autoControlPlantation()
{
//--------------------------------- BƠM NƯỚC ------//
if (soilMoist < DRY_SOIL && lumen > DARK_LIGHT)
{
turnPumpOn();
}
}Kết quả
Hiện tại hên là đất của mình quá thiếu nước nên sau 50s kiểm tra thì hệ thống lại tự bật relay để tưới nước, bạn có thể nhìn qua LED báo hiệu trên relay ở hình

Gửi dữ liệu lên cloud
Phù, thế là xong phần offline, ta đã có được một hệ thống có thể nắm bắt được tình hình môi trường, đất đai thông qua các thông số và cho các bác nông dân có thể biết được các số liệu có liên quan về nhiệt độ độ ẩm, ngoài ra còn có thể tự điều khiển tưới tiêu đáp ứng được một số yêu cầu cơ bản rồi.
Thế nhưng vừa xử xong được cái này thì lại đẻ ra một vấn đề mới, đó là bác nông dân đi uống cà phê sáng với bạn bè, muốn kiểm tra xem tình trạng cây trồng ở nhà như thế nào, tranh thủ khoe luôn với anh em xem hệ thống vườn sau siêu sạch của mình, nhiều lúc bác cũng muốn tác động điều khiển bơm nước và bơm thuốc trừ sâu mà ở xa quá, chạy về thì mất bao nhiêu công. Ước gì giải quyết được vấn đề này thì bác an nhàn đi khắp mọi miền đất nước mà không phải lo lắng gì cả.
Vậy giải pháp ở đây là gì ? Có thể cho con BOT này kết nối với internet, xong đẩy dữ liệu lên đâu đó, kiểu như 1 trang web giống giống facebook, rồi chỉ với điện thoại/ laptop ta có thể cập nhật được mọi thông tin, nó khác facebook ta cập nhật tin tức từ bạn bè, còn trang này thì cập nhật tin tức về tình hình cây trồng ở nhà. May quá có anh thingspeak đây rồi.
Nói về thingspeak một chút thì đây là một server chuyên dùng để lưu dữ liệu, được nhất là nó miễn phí, biểu thị data theo thời gian cũng tốt, và dễ dùng. Nếu bạn có thắc mắc là tôi tự build một server được không ? thì câu trả lời là hoàn toàn có thể, nếu bạn làm hệ thống lớn hơn và cần server riêng thì có thể tự build một cái, lưu ý là chi phí nuôi server cùng các vấn đề liên quan cũng khá tốn kém nhé :D. Cái của mình làm thì nhỏ và tận dụng những gì có sẵn thì thingspeak đã phù hợp rồi ?
Tạm thời nêu chút vấn đề tại sao lại cho lên cloud, quá trình này được mọi người hay râm ran trên mạng là IOT, thuật ngữ gây tranh cãi và làm tốn bao nhiêu status cũng như tranh cãi của mọi người trên các diễn đàn.
Theo mình thì hiểu đơn gian IOT = Internet of Things, hiểu luôn tiếng việt là mọi vật kết nối internet, vậy thì như con BOT của mình mà kết nối được internet thì chắc được gọi là IOT rồi, hehe
Thôi tạm dừng chém, giờ làm thế nào để con BOT có thể kết nối và gửi dữ liệu lên thingspeak ? Mình có viết một bài về cách gửi dữ liệu thingspeak các bạn có thể tham khảo để kiểm tra Thingspeak với ESP8266 và TIVA C
Giờ thì mình gom mấy hàm đã viết vào chương trình chính để gửi toàn bộ dữ liệu lên thingspeak luôn, có một số lệnh mình gom lại thành hàm để thuận tiện sử dụng lại, gồm có 4 hàm để thực hiện quá trình cập nhật dữ liệu lên thingspeak là
startThingSpeakCmd()để thiết lập kết nối với server thingspeaksendThingSpeakCmd()để gửi độ dài dataupdateDataThingSpeak()để gửi thông số về cảm biến, trạng tháiupdateCmdThingSpeak()để cập nhật trạng thái bơm
Hàm viết đã xong, giờ gom tất cả vào một, thêm chức năng gửi dữ liệu lên thingspeak nữa là kết thúc thôi :D. Trước khi gom thì cần thêm hàm updateCmdThingSpeak() vào trong hàm turnPumpOn() và hàm readLocalCmd() , để mỗi khi có sự thay đổi trạng thái bơm thì cập nhật ngay lên thingspeak.
Thời gian bật bơm nước, lấy dữ liệu mình tăng lên 1 ít, để cho nó giống với thực tế chút.
Lưu ý cần thay một số thông số sau cho phù hợp với wifi và thingspeak của bạn
sendATcommand(“AT+CWJAP=”ten_wifi”,”mat_khau””, “OK”, 3000); //Thay ten_wifi và mat_khau của bạn
char msg[] = “GET /update?key=xxxxxxxxx”; //Thay xxxxxxxxx bằng key của bạn ở mục API Write key
/* Chương trình đọc nhiệt độ, độ ẩm từ cảm biến DHT
Thêm chức năng đọc cảm biến ánh sáng
Thêm chức năng đọc cảm biến độ ẩm đất
Thêm hiển thị LCD
Thêm chức năng điều khiển tưới tiêu bằng tay 2 bơm
Thêm chức năng điều khiển tự động bơm khi thiếu nước
Thêm chức năng cập nhật dữ liệu qua cloud thingspeak
HocARM NDTR BOT by hocARM.org
-------------------------------------------------
Kết nối
DHT | TIVA C
--------------------
VCC(1) | 3.3V
DATA(2) | PD0
NC(3) | x
GND(4) | GND
Nối trở 10k giữa chân 1 và chân 2
------------------------------------------
So thu tu GLCD và kết nối với TIVA
// Pin | Chuc nang | TIVA C
//------------------------------------------
// 1 | GND | GND
// 2 | RST | PE1
// 3 | SCK | PD2
// 4 | A0(C/D) | PD3
// 5 | LED K+ (3.3V) | 3.3V
// 6 | LED A (GND) | GND
// 7 | SDA | PD1
// 8 | CS | PE2
// 9 | VCC | 3.3V
// 10 | GND | GND
Sử dụng 2 nút nhấn có sẵn trên TIVA (PF4 và PF0)
Sử dụng 2 chân PC6 và PC7 nối với Modul 2 Relay
Lưu ý GND Relay nối với GND của TIVA C
Kết nối ESP8266 TIVA
ESP8266 | TIVA | Nguồn ngoài
VCC | x | 3.3v
GND | GND | GND
CH_PD | x | 3.3v
RX | PB1 | x
TX | PB0 | x
*/
#include "DHT.h"
#include "homephone.h"
#define DHTPIN PD_0 // Chân DATA nối với PD0
#define LDR_PIN PE_3 // Chân PE3 nối với chân OUT cảm biến as
#define SOIL_MOIST_1_PIN PE_4 // Chân PE4 nối với cảm biến độ ẩm
// Relay, nút nhấn
#define PUMPW_ON PF_4 //Nút có sẵn trên kit
#define PUMPW_PIN PC_6
#define PUMPS_ON PF_0 //Nút có sẵn trên kit
#define PUMPS_PIN PC_7
#define IP "184.106.153.149"// thingspeak.com ip
#define GREEN_LED PF_3
// Uncomment loại cảm biến bạn sử dụng, nếu DHT11 thì uncomment DHT11 và comment DHT22
//#define DHTTYPE DHT11 // DHT 11
#define DHTTYPE DHT22 // DHT 22 (AM2302), AM2321
//#define DHTTYPE DHT21 // DHT 21 (AM2301)
const unsigned char ha_lg [] = {
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x80, 0x80, 0x80, 0x80, 0x80, 0x80,
0xC0, 0xC0, 0xC0, 0xC0, 0xC0, 0xC0, 0xE0, 0xE0, 0xC0, 0x80, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0xC0, 0xC0, 0x80, 0x00, 0x00, 0x00, 0x00, 0x07, 0x1F, 0xFF, 0xF3, 0x87, 0x87, 0xC7,
0xC6, 0xEE, 0xFC, 0xFC, 0xFE, 0xFF, 0x3F, 0x18, 0x19, 0x3B, 0x37, 0x3E, 0xBC, 0xF8, 0xF8, 0xF8,
0xF0, 0x60, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0xF0, 0xFF, 0xBF, 0xC3, 0xE7, 0x7E, 0x7C, 0x7C, 0x7C, 0xFC, 0xCE, 0x87, 0xFF, 0xFF, 0xFD, 0x9E,
0x87, 0xF9, 0xFF, 0x1F, 0x80, 0xC0, 0xE0, 0x70, 0xF8, 0xFE, 0x7F, 0x1F, 0x07, 0x01, 0x07, 0x3F,
0xFC, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0xDE, 0xC0,
0xC0, 0xC0, 0xC0, 0xDF, 0xFF, 0xFF, 0xFF, 0x00, 0xC0, 0xE0, 0xF0, 0x70, 0x38, 0x38, 0x38, 0x78,
0xF0, 0xE0, 0xC0, 0x00, 0xE0, 0xF0, 0xF0, 0x78, 0x38, 0x38, 0x78, 0x70, 0x70, 0x00, 0x00, 0x80,
0xE0, 0xF8, 0xFE, 0x3F, 0x3F, 0xFF, 0xFC, 0xE0, 0x80, 0x00, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0x87,
0x87, 0x87, 0xCF, 0xCE, 0xFE, 0xFC, 0x78, 0x00, 0x00, 0xFF, 0xFF, 0xFF, 0x7F, 0xFC, 0xF0, 0xC0,
0x80, 0xE0, 0xF8, 0xFE, 0x3F, 0xFF, 0xFF, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1F,
0xFF, 0xF1, 0x81, 0x00, 0x80, 0xC0, 0xF0, 0x78, 0x1E, 0x8F, 0xC3, 0xC7, 0xEE, 0x7F, 0xFF, 0xFF,
0xFF, 0x3E, 0x37, 0xF3, 0xF1, 0x3C, 0x3F, 0x37, 0x31, 0x30, 0x30, 0x30, 0x30, 0x30, 0x30, 0x31,
0x3F, 0x3F, 0x38, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x3D, 0x01, 0x01,
0x01, 0x01, 0x3D, 0x3F, 0x3F, 0x3F, 0x00, 0x07, 0x0F, 0x1F, 0x3C, 0x38, 0x38, 0x38, 0x3C, 0x1F,
0x1F, 0x07, 0x00, 0x0F, 0x1F, 0x1F, 0x38, 0x38, 0x38, 0x38, 0x1C, 0x1C, 0x30, 0x3E, 0x3F, 0x1F,
0x07, 0x07, 0x07, 0x07, 0x07, 0x07, 0x1F, 0x3F, 0x3E, 0x30, 0x00, 0x3F, 0x3F, 0x3F, 0x03, 0x03,
0x07, 0x0F, 0x1F, 0x3F, 0x38, 0x30, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x00, 0x01, 0x07, 0x1F, 0x1F,
0x0F, 0x03, 0x00, 0x00, 0x3F, 0x3F, 0x3F, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1D,
0x3F, 0x3F, 0x3E, 0x3F, 0x3F, 0x36, 0x37, 0x33, 0x31, 0x71, 0x70, 0x60, 0x60, 0xE1, 0xFF, 0xFF,
0xFC, 0x6F, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x01, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
};
// Biến lưu các giá trị cảm biến
int humDHT;
int tempDHT;
int lumen;
int DARK_LIGHT = 40;
int soilMoist;
int DRY_SOIL = 40;
int WET_SOIL = 60;
// Biến lưu trạng thái bơm
boolean pumpWaterStatus = 0;
boolean pumpPesStatus = 0;
int timePumpOn = 60; // Thời gian bật bơm nước
// Biến cho timer
long sampleTimingSeconds = 120; // ==> Thời gian đọc cảm biến (s)
long startTiming = 0;
long elapsedTime = 0;
char msg[] = "GET /update?key=xxxxxxxxx"; //Thay xxxxxxxxx bằng key của bạn ở mục API Write key
char cmd[100];
char aux_str[100];
int legth;
// Khởi tạo cảm biến
DHT dht(DHTPIN, DHTTYPE);
// Khởi tạo LCD
homephone lcd (PD_1, PD_2, PD_3, PE_1, PE_2);
void setup() {
pinMode(PUMPW_PIN, OUTPUT);
pinMode(PUMPS_PIN, OUTPUT);
pinMode(PUMPW_ON, INPUT_PULLUP); // Nút nhấn
pinMode(PUMPS_ON, INPUT_PULLUP); // Nút nhấn
// Khởi tạo cổng serial baud 115200
Serial.begin(115200);
Serial1.begin(9600);
Serial.println("HocARM NDTR Bot!");
// Bắt đầu đọc dữ liệu
dht.begin();
lcd.begin(); //Khởi tạo LCD
lcd.setContrast(0x0A); //Đặt độ tương phản
lcd.clear(); //Xóa màn hình
lcd.drawBitmap(0, 0, 127, 63, ha_lg, black); // Hiển thị hình bitmap
lcd.display();
connectWiFi();
readSensors(); // Khởi tạo đọc cảm biến
startTiming = millis(); // Bắt đầu đếm thời gian
lcd.clear();
}
void loop() {
// Khởi tạo timer
elapsedTime = millis() - startTiming;
readLocalCmd();
showDataLCD();
if (elapsedTime > (sampleTimingSeconds * 1000))
{
readSensors();
printData();
autoControlPlantation();
updateDataThingSpeak();
startTiming = millis();
}
}
int getLumen(int anaPin)
{
int anaValue = 0;
for (int i = 0; i < 10; i++) // Đọc giá trị cảm biến 10 lần và lấy giá trị trung bình
{
anaValue += analogRead(anaPin);
delay(50);
}
anaValue = anaValue / 10;
anaValue = map(anaValue, 4095, 0, 0, 100); //Tối:0 ==> Sáng 100%
return anaValue;
}
int getSoilMoist()
{
int i = 0;
int anaValue = 0;
for (i = 0; i < 10; i++) //
{
anaValue += analogRead(SOIL_MOIST_1_PIN); //Đọc giá trị cảm biến độ ẩm đất
delay(50); // Đợi đọc giá trị ADC
}
anaValue = anaValue / (i);
anaValue = map(anaValue, 4095, 0, 0, 100); //Ít nước:0% ==> Nhiều nước 100%
return anaValue;
}
void readSensors(void)
{
tempDHT = dht.readTemperature(); //Đọc nhiệt độ DHT22
humDHT = dht.readHumidity(); //Đọc độ ẩm DHT22
lumen = getLumen(LDR_PIN); //Đọc ánh sáng
soilMoist = getSoilMoist(); //Đọc cảm biến độ ẩm đất
}
void showDataLCD(void)
{
lcd.setTextColor(black, white);
lcd.setCursor(0, 0); //đặt con trỏ vào tọa độ (0,0)
lcd.print("**-HOCARM NDTR Bot-**");
lcd.setCursor (0, 10);
lcd.print("---------------------");
lcd.setCursor (0, 20);
lcd.print("Nhdo: ");
lcd.print(tempDHT);
lcd.print("oC Doam: ");
lcd.print(humDHT);
lcd.print("% ");
lcd.setCursor (0, 30);
lcd.print("Asag: ");
lcd.print(lumen);
lcd.print("%");
lcd.print(" Amdat: ");
lcd.print(soilMoist);
lcd.print("%");
lcd.setCursor (0, 40);
lcd.print("BomN: ");
lcd.print(pumpWaterStatus);
lcd.print(" BomS: ");
lcd.print(pumpPesStatus);
lcd.display();
lcd.setCursor (0, 0);
lcd.display();
}
void printData(void)
{
// IN thông tin ra màn hình
Serial.print("Do am: ");
Serial.print(humDHT);
Serial.print(" %\t");
Serial.print("Nhiet do: ");
Serial.print(tempDHT);
Serial.print(" *C\t");
Serial.print("Anh sang: ");
Serial.print(lumen);
Serial.print(" %\t");
Serial.print("Do am dat: ");
Serial.print(soilMoist);
Serial.println(" %");
}
/***************************************************
Hàm bật bơm nước
****************************************************/
void turnPumpOn()
{
digitalWrite(PUMPW_PIN, LOW);
pumpWaterStatus = 1;
showDataLCD();
updateCmdThingSpeak();
delay (timePumpOn * 1000);
digitalWrite(PUMPW_PIN, HIGH);
pumpWaterStatus = 0;
showDataLCD();
updateCmdThingSpeak();
}
/****************************************************************
Hàm đọc trạng thái bơm và kiểm tra nút nhấn
(Nút nhấn mặc định là mức "CAO"):
****************************************************************/
void readLocalCmd()
{
int digiValue = debounce(PUMPW_ON);
if (!digiValue)
{
pumpWaterStatus = !pumpWaterStatus;
showDataLCD();
aplyCmd();
updateCmdThingSpeak();
}
digiValue = debounce(PUMPS_ON);
if (!digiValue)
{
pumpPesStatus = !pumpPesStatus;
showDataLCD();
aplyCmd();
updateCmdThingSpeak();
}
}
/***************************************************
Thực hiện điều khiển các bơm
****************************************************/
void aplyCmd()
{
if (pumpWaterStatus == 1) digitalWrite(PUMPW_PIN, LOW);
if (pumpWaterStatus == 0) digitalWrite(PUMPW_PIN, HIGH);
if (pumpPesStatus == 1) digitalWrite(PUMPS_PIN, LOW);
if (pumpPesStatus == 0) digitalWrite(PUMPS_PIN, HIGH);
}
/***************************************************
Hàm kiểm tra trạng thái phím bấm
****************************************************/
boolean debounce(int pin)
{
boolean state;
boolean previousState;
const int debounceDelay = 60;
previousState = digitalRead(pin);
for (int counter = 0; counter < debounceDelay; counter++)
{
delay(1);
state = digitalRead(pin);
if (state != previousState)
{
counter = 0;
previousState = state;
}
}
return state;
}
/***************************************************
Chức năng tự động tưới tiêu
****************************************************/
void autoControlPlantation()
{
//--------------------------------- BƠM NƯỚC ------//
if (soilMoist < DRY_SOIL && lumen > DARK_LIGHT)
{
turnPumpOn();
}
}
// Hàm gửi lệnh AT
int8_t sendATcommand(char* ATcommand, char* expected_answer, unsigned int timeout) {
uint8_t x = 0, answer = 0;
char response[100];
unsigned long previous;
memset(response, '\0', 100); // xóa buffer
delay(100);
while ( Serial1.available() > 0) Serial1.read(); // đọc input
Serial1.println(ATcommand); // Gửi lệnh AT
x = 0;
previous = millis();
// Chờ phản hồi
do {
if (Serial1.available() != 0) {
// Nếu có dữ liệu trong buffer UART, đọc và kiểm tra nó với expected_answer
response[x] = Serial1.read();
x++;
// Nếu đúng thì trả kết quả answer = 1, thoát hàm
if (strstr(response, expected_answer) != NULL)
{
answer = 1;
}
}
} while ((answer == 0) && ((millis() - previous) < timeout)); // Nếu sai thì tiếp tục thử lại cho tới hết thời gian timeout
Serial.println(response); // In giá trị nhận được để debug
return answer;
}
// Hàm gửi lệnh AT 2 để gửi dữ liệu
int8_t sendATcommand2(char* ATcommand, char* expected_answer1,
char* expected_answer2, unsigned int timeout) {
uint8_t x = 0, answer = 0;
char response[100];
unsigned long previous;
memset(response, '\0', 100); // Khởi tạo lại chuỗi về 0
delay(100);
while ( Serial1.available() > 0) Serial1.read(); // Xóa buffer
Serial1.println(ATcommand); // Gửi lệnh AT
x = 0;
previous = millis();
// Chờ phản hồi
do {
// Nếu có dữ liệu từ UART thì đọc và kiểm tra
if (Serial1.available() != 0) {
response[x] = Serial1.read();
x++;
// Trả về giá trị 1 nếu nhận được expected_answer1
if (strstr(response, expected_answer1) != NULL)
{
answer = 1;
}
// Trả về giá trị 2 nếu nhận được expected_answer2
else if (strstr(response, expected_answer2) != NULL)
{
answer = 2;
}
}
}
// Đợi time out
while ((answer == 0) && ((millis() - previous) < timeout));
Serial.println(response); // In giá trị nhận được để debug
return answer;
}
/***************************************************
Kết nối wifi
****************************************************/
void connectWiFi(void)
{
sendATcommand("AT", "OK", 5000); //Kiểm tra kết nối
sendATcommand("AT+CWMODE=1", "OK", 5000); //Cấu hình chế độ station
sendATcommand("AT+CWJAP=\"ten_wifi\",\"mat_khau\"", "OK", 5000);
sendATcommand("AT+CIPMUX=1", "OK", 5000); // Bật chế độ đa kết nối
sendATcommand("AT+CIFSR", "OK", 5000); // Hiển thị ip
Serial.println("ESP8266 Connected");
}
/***************************************************
Kết nối với ThingsSpeak.com
****************************************************/
void startThingSpeakCmd(void)
{
memset(aux_str, '\0', 100);
snprintf(aux_str, sizeof(aux_str), "AT+CIPSTART=1,\"TCP\",\"%s\",80", IP);
if (sendATcommand2(aux_str, "OK", "ERROR", 20000) == 1)
{
Serial.println("OK Connected Thingspeak");
}
}
/***************************************************
Gửi data lên channel ThingsSpeak.com
****************************************************/
void sendThingSpeakCmd(void)
{
memset(aux_str, '\0', 100);
sprintf(aux_str, "AT+CIPSEND=1,%d", legth);
if (sendATcommand2(aux_str, ">", "ERROR", 20000) == 1)
{
sendATcommand2(cmd, "SEND OK", "ERROR", 10000);
}
}
/***************************************************
Truyền tất cả dữ liệu lên thingspeak.com và đóng kết nối
****************************************************/
void updateDataThingSpeak(void)
{
startThingSpeakCmd();
// Gửi toàn bộ thông tin cảm biến cũng như trạng thái lên thingspeak
sprintf(cmd, "%s&field1=%d&field2=%d&field3=%d&field4=%d&field5=%d&field6=%d", msg, tempDHT, humDHT, lumen, soilMoist, pumpWaterStatus, pumpPesStatus);
legth = strlen(cmd) + 2;
sendThingSpeakCmd();
sendATcommand("AT+CIPCLOSE=1", "OK", 5000);
}
/***************************************************
Cập nhật trạng thái bơm lên thingspeak.com
****************************************************/
void updateCmdThingSpeak(void)
{
digitalWrite(GREEN_LED, HIGH); // Bật đèn xanh báo quá trình truyền bắt đầu
for (int i = 0; i < 2; i++) // Thực hiện 2 lần cho chắc ăn
{
startThingSpeakCmd ();
// Cập nhật trạng thái bơm
sprintf(cmd, "%s&field5=%d&field6=%d", msg, pumpWaterStatus, pumpPesStatus);
legth = strlen(cmd) + 2;
sendThingSpeakCmd();
sendATcommand("AT+CIPCLOSE=1", "OK", 5000);
}
digitalWrite(GREEN_LED, LOW); // Kết thúc quá trình tắt đèn xanh
}Mình quên mất, phải chỉnh chút cấu hình trên thingspeak với chỉnh sửa lại tên các trục để biết biểu đồ nào, hiển thị thông số gì nữa chứ.
Các bạn vào tài khoản thingspeak của mình, thẻ Channel setting bật hết 8 field lên, mình dùng chỉ 6 field thôi, 2 cái để dành :D, nếu muốn public channel của mình cho mọi người quan sát được thì tick chọn vào Make public là ổn.
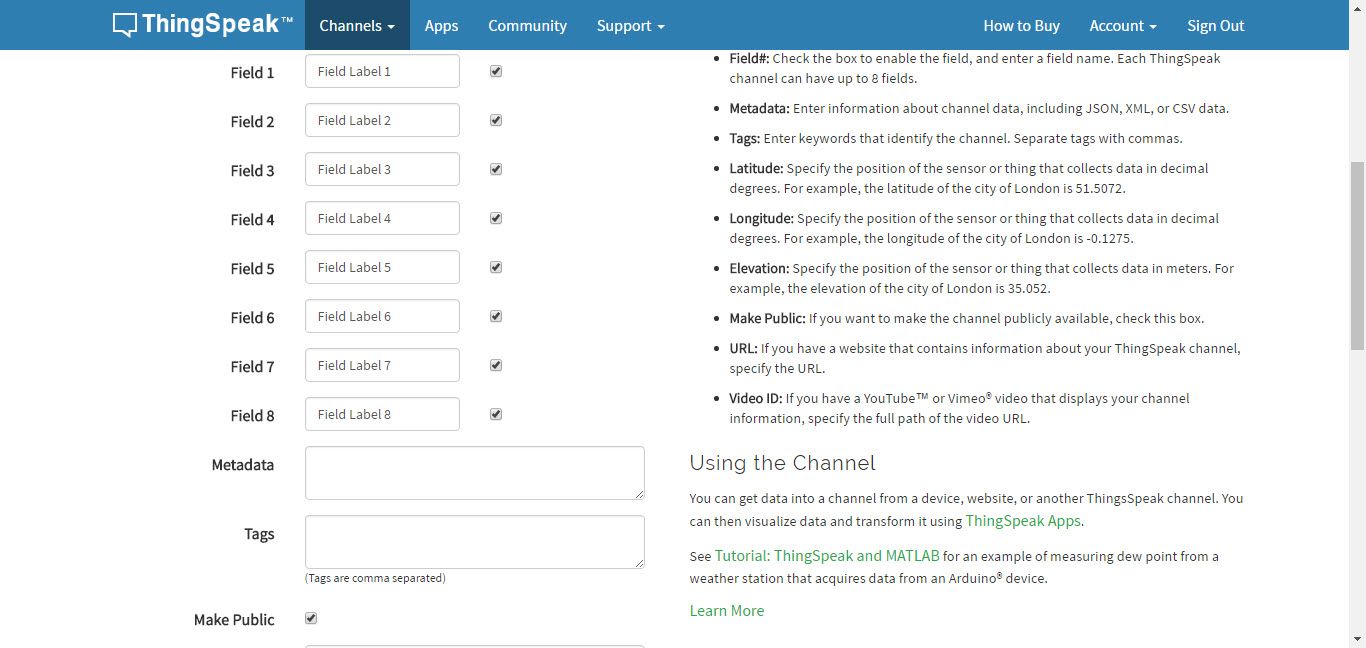
Vào lại thẻ Private View chỉnh lại mô tả về field để dễ biết đâu là biểu đồ nhiệt độ, đâu là biểu đồ độ ẩm,…
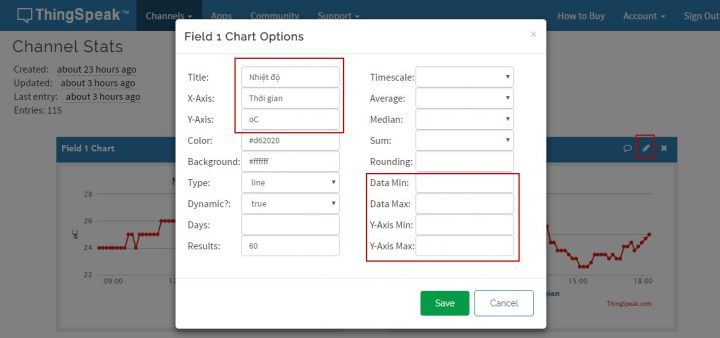
Kết quả
Kết quả có thể theo dõi được trên thingspeak sẽ có dạng như hình dưới đây, khá là trực quan và rõ ràng
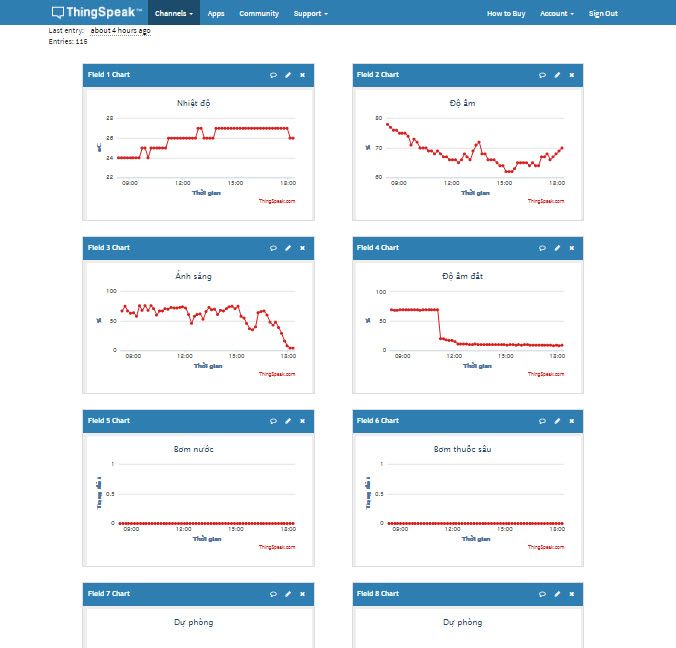
Các bạn có thể xem channel mình public tại https://thingspeak.com/channels/222622/
Toàn bộ chương trình cho ae tham khảo tại đây nhé
 hocarm
hocarm
Tạm kết
Tới đây là thở phào nhẹ nhõm rồi, viết mãi mới xong, bài hướng dẫn trên chỉ là bước khởi đầu để bạn có thể biết được từ ý tưởng tới một phiên bản prototype để đem đi thử nghiệm là như thế nào, đồng thời cũng biết được thêm xíu xiu về cái IOT và cách mạng công nghiệp lần thứ 4 mà mọi người vẫn đang truyền miệng khắp nơi. Tất nhiên nó chỉ ở mức độ cơ bản, chỉ phục vụ cho nhu cầu cá nhân, vẫn còn rất nhiều vấn đề phải làm và cải tiến thêm như đem ra thử nghiệm, lấy số liệu, thông số để điều khiển, giám sát qua điện thoại, … các phiên bản với Arduino, STM32 thì chắc mình xin hẹn bài viết sau thôi ?
Nếu bạn muốn thương mại một sản phẩm gọi là công nghệ cao trong nông nghiệp thì cần phải giải quyết thêm vô vàn bài toán về những vấn đề về kinh phí, về phần cứng, về dữ liệu, bảo mật, về làm app riêng trên điện thoại, về các điều kiện thổ nhưỡng đất đai để cây trồng phát triển, vv và vv, thậm chí cả những vấn đề chẳng liên quan chút nào tới kỹ thuật. Cái này hơi vĩ mô chút nên thôi mình xin phép không chém ?
